Download
1 / 11
110 likes | 245 Views
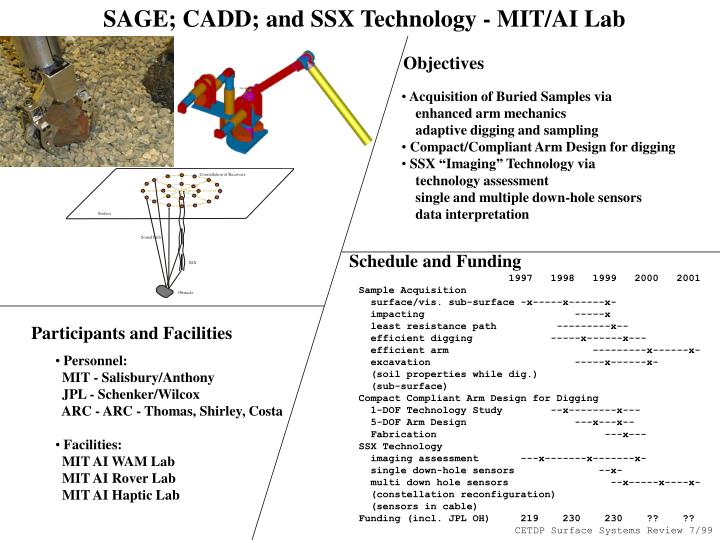
SAGE; CADD; and SSX Technology - MIT/AI Lab. Objectives. Acquisition of Buried Samples via enhanced arm mechanics adaptive digging and sampling Compact/Compliant Arm Design for digging SSX “Imaging” Technology via technology assessment

E N D
SAGE; CADD; and SSX Technology - MIT/AI Lab Objectives • Acquisition of Buried Samples via • enhanced arm mechanics • adaptive digging and sampling • Compact/Compliant Arm Design for digging • SSX “Imaging” Technology via • technology assessment • single and multiple down-hole sensors • data interpretation Schedule and Funding 1997 1998 1999 2000 2001 Sample Acquisition surface/vis. sub-surface -x-----x------x- impacting -----x least resistance path ---------x-- efficient digging -----x------x--- efficient arm ---------x------x- excavation -----x------x- (soil properties while dig.) (sub-surface) Compact Compliant Arm Design for Digging 1-DOF Technology Study --x--------x--- 5-DOF Arm Design ---x---x-- Fabrication ---x--- SSX Technology imaging assessment ---x-------x-------x- single down-hole sensors --x- multi down hole sensors --x-----x----x- (constellation reconfiguration) (sensors in cable) Funding (incl. JPL OH) 219 230 230 ?? ?? Participants and Facilities • Personnel: • MIT - Salisbury/Anthony • JPL - Schenker/Wilcox • ARC - ARC - Thomas, Shirley, Costa • Facilities: • MIT AI WAM Lab • MIT AI Rover Lab • MIT AI Haptic Lab
Task history and accomplishments prior to FY 99 • Adaptive Digging • Cartesian impedance based digging method • Path of least resistance for yanking of constrained objects. • Obstacle Avoidance and Detection • Experiments to gain insight into the primary challenges in robotic digging and buried object retrieval. • Buried Rock Removal Strategies • FEM/BEM Soil-Tool Interaction Modeling • Compliant Arm Design • Linear Compliant Elements • Series Elastic Actuator • Haptic Geology Proof-of-Concept • Sensing and simulation for planar, rigid textures based on a stick slip friction model and a simple representation of surface micro-geometry • Modeling, Sensing, and Display • Grows into MarsScape project. • SSX Technology • Ultrasonic Material Properties Sensor (UMPS) • Identify: Rock Crystal Size, Density, Speed of Sound • Soil, Water Content Characterization • Radar, Acoustic • Simple TOF Tomographic Inversion, Constellation of Acoustic Receivers • Scale model experiments / verification. • Preliminary Sensor Package for deployed arrays.
Level-1 milestone and level-2 milestones for FY 99 Compliant Arm Design • Develop 1-DOF prototypes to verify and refine the "compliance element" models • Characterize performance of prototypes for simple contact tasks and positioning tasks. • Develop design specification of a "ruggedized" arm mechanism capable of withstanding the shocks and harshness of scraping and digging tasks. • Evaluate the design tradeoffs associated with cable driven actuators for planetary robotics • Arm design and fabrication. • Report on a comparative/metric basis for the work. Performance of identified tasks with/without the compliance enhancement. Adaptive Sample Acquisition • Evaluate and develop soil-tool interaction models. • Demonstrate robust techniques designed to follow the contour of buried obstacles. • Select and develop appropriate force control techniques for interacting with deforming compliant media (soils). • Use knowledge of soil properties and soil-tool interaction modeling to locally improve trenching efficiency. • Development of control methodology which can do basic online adaptation to the varying soil mediums. • Identify planetary science tasks that can be made possible, or greatly improved by our unique combination of non-linear (exponential) mechanical compliance and adaptive force control algorithms. • Implement path of least resistance algorithm and other algorithms on a compliance added JPL arm SSX Technology • Continue to develop 3D tomographic inversion routines using a surface distributed constellation of receivers. • Work with Brian Wilcox over the summer to experimentally determine acoustic-radiation pattern for the SSX. • Incorporate experimentally acquired acoustic radiation pattern in to the tomographic inversion models. • Report on performance benchmarks, as measured by resolution at depth, and error in identified obstacle location.
Relevance to NASA This and the following slides….. Goal: Bring new technologies for remote information gathering and presentation to the NASA planetary exploration effort. Our activities are linked to the following specific NASA projects: Long Range Science Rover, Microlander Dexterous Manipulator, Lightweight Survivable Rover Sample Acquisition Project and the Rover Design and Integration program (Schenker - JPL) MVACS Arm (Bonitz - JPL) Demonstration and evaluation of sample and information acquisition with a compliant arm versus a similar (kinematics) non-compliant arm. Develop adaptive sample excavation, digging, and manipulation algorithms for intelligent sample acquisition. Sub-Surface explorer (SSX) program at (Wilcox - JPL) Provide “vision” and sensory feedback to the SSX.
Compliant Arm Design for Digging Surface Systems Exponential Compliant Coupling Springs • PRODUCT DESCRIPTION:Arm designs containing non-linear (exponential) mechanical compliance. Control algorithms for using said arms for efficient excavation and digging. • PRODUCT FUNCTION:Provide a robust arm design for interacting with unknown obstacles and environments. A naturally compliant arm can be used as a force sensor to enable force control. • UNDERLYING TECHNOLOGIES: • Exponentially stiffening compliance to provide constant force measurement resolution over the entire dynamic range. Metrics: Improved force measurement over entire dynamic range. Improved response to the complex dynamics of active digging and trenching. • Current TRL • TRL 2 (99) • PRODUCT DEVELOPERS • J.K. Salisbury/ Andrew Curtis / Arrin Katz • 617 253 5834 / 5899 / 8966 • jks,acurtis,katza@ai.mit.edu • CUSTOMERS • Paul Schenker
Sample Acquisition, Grasping, and ExcavationSurface Systems • PRODUCT DESCRIPTION:Control algorithms and sensor specifications to provide for power/energy efficient surface and near surface sample acquisition • PRODUCT FUNCTION:Robotic Technology for Buried Sample Acquisition. • UNDERLYING TECHNOLOGIES: • Force controlled arm/surface interaction. Compliant arm control. Metrics: Soil displaced/removed vs. power. Rock surface exposed vs. time & power. • Current TRL • TRL 3 (99) • PRODUCT DEVELOPERS • J.K. Salisbury / W. Jesse Hong • 617 253 5834 / jks@ai.mit.edu • 617 253 5848 / jesse@ai.mit.edu • CUSTOMERS • Paul Schenker • Bonitz
SSX Technology - Underground “Vision”Surface Systems - Subsurface Explorer • PRODUCT DESCRIPTION:Algorithms and sensor specifications to provide “Vision” to the Subsurface Explorer • PRODUCT FUNCTION:Provide “Vision” to the Subsurface Explorer for obstacle avoidance and navigation. • UNDERLYING TECHNOLOGIES: • SSX acts as acoustic source. Constellation of receivers on surface. 3D Tomographic inversion to provide a map of subsurface features and obstacles. • Current TRL • TRL 2 (99) • PRODUCT DEVELOPERS • Brian Anthony • 617 253 5899/ banthony@ai.mit.edu • CUSTOMERS • Brian Wilcox - Subsurface Explorer • Potential Customers: Rover based systems to provide underground map/image of an area local to a rover. Ex: Ben Dolgin for underground drilling.
Sample Acquisition, Grasping, and Excavation (SAGE) Obstacle Negotiation in Robotic Excavation • Wrote and submitted a conference paper documenting our previously developed techniques for obstacle negotiation and contour following in robotic excavation. • Hong, WJ and Salisbury, JK. “Obstacle Negotiation in Robotic Excavation”, IASTED Robotics and Applications 1999 Determination of the path of least resistance is used to trace the contour of the object, technique was verified experimentally. Soil-Tool Interaction Modeling • Wrote basic simulation code to study existing soil-tool interaction theories for predicting draft forces during excavation. This is a necessary stepping stone to improving digging effectiveness and for developing techniques for extracting soil characteristics from interaction data. Three dimensional model of soil failure zones. Factors contributing to net resistance force are shown in green.
Compliant Arm Design for Digging - CADD • Prototype exhibits desirable nonlinear behavior over 30° range for 800 mNm force range -- working on increasing the force range without sacrificing sensitivity or range of motion. • Dynamic range of 100 demonstrated (Max force exerted / Min force detected) -- limited by sensor resolution (encoder) -- working on better resolution in a smaller package using a potentiometer. • 1-DOF Test Mechanism of a Compliant Element Cable Transmission • 1-DOF Test-Mechanism of “Wrapping-Spring” Compliant Joint • Designed a prototype rover scale YPPR arm for the evaluation of integrated compliant element performance during digging tasks. Beginning construction now. Non-linear (exponential) force-displacement curve successfully obtained. Will provide for a constant dynamic range force measurement. 12 in 14 in
Surface Sound Path SSX Distance From Surface: 0 m 700 m 1500 m SSX Obstacle 200 m Note: SSX not drawn to scale. 100 m SSX Imaging Technology Developed theory, and algorithms to image subsurface obstacle using a buried source (the SSX) and a Constellation of Receivers. Demonstrated need for re-configurable Constellation as depth of SSX is increased. The code for a travelling SSX and the algorithm for redeployment of Receivers is being developed. Constellation of Receivers Imaged Location Obstacle Location If the constellation of receivers is stationary as the SSX goes deeper, it becomes difficult to pinpoint the location of the obstacle.