Download
1 / 20
380 likes | 894 Views
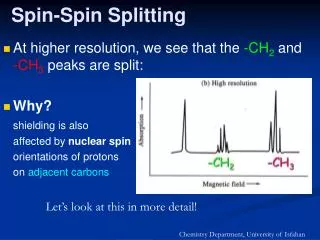
Z. z. x. y. Y. X. y. Y. Z. z. X. x. SPIN STABILILIZATION. 1. INTRODUCTION Dynamics, Astrodynamics Orbital Dynamics, Attitude Dynamics Basic terminology Attitude. H. . Z. H. . Y. X. Spin stabilization. Single Spinners. Dual Spinners. H. . z,p. z. z. H. .

E N D
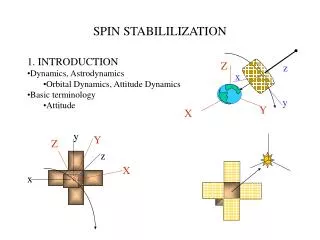
Z z x y Y X y Y Z z X x SPIN STABILILIZATION • 1. INTRODUCTION • Dynamics, Astrodynamics • Orbital Dynamics, Attitude Dynamics • Basic terminology • Attitude
H Z H Y X • Spin stabilization
Single Spinners Dual Spinners
H z,p z z H H, ,p x x x y y y • 2. The Euler’s Moment Equations • Rigidy body dynamics: rotational motion in space • Torque-free motion • Reference systems: • geometrical • Angular momentum axis • instantaneous rotation axis • principal axes Pure rotation Conning Nutation
z dm O x y Torque-free motion
Major Axis Rule for Spin Stabilization • Stability of rotation about principal axes • Consider the the perturbed the steady motion given • by the Euler’s moment equation for torque-free motion: Differentating w.r.t. time and eliminating
Differentating w.r.t. time and eliminating Both of these equations represent simple harmonic oscillator with general solution: Where If is imaginary jwill diverge andis unstable. must be real for stability. This is satisfied when (Ix-Iy)(Ix-Iz) > 0 . Motion is stable when Ix>Iy e Ix>Iz or when Ix<Iy e Ix<Iz Conclusion: motion is stable about major or minor axis but motion about intermediate axis is unstable.
Internal Energy Dissipation Effects • All real spacecraft have, at least, some nonrigid properties. • These include: elastic structural deflection and sloshing. • Some lessons learned from the past: • Explorer I (1958)
Energy dissipation Since for torque-free motion the angular momentum must be conserved motion about the major axis corresponds to the minimum energy state. Conclusion: a semirigid body is stable only when spinning about the major axis, bringing about the major axis rule for spin stabilization.
Adverse Effect Control System Probable Cause Year Satellite Spin Stabilized Internal Energy dissipation 1958 Explorer I Unstable Spin Stabilized Rapid Spin Decay Solar Torque on Thermally Deformed Satellite 1952 Alouette Solar Torque on Thermally Deformed Satellite Explorer XX Spin Stabilized Rapid Spin Decay 1964 Internal Energy Dissipation Spin Stabilized with active Nutation Control Unstable 1969 ATS-5 Examples of Flexibility and/or Dissipation Effects
F R Momentum precession and spin thrusters locations
Nutation Damper Torque coil SACI-1: Spin Stabilized with Geomagnetic Control
SCD-1: Spin Stabilized Partially Filled Ring Nutation Damper Torque Coil
Nutation damper Spin plane coils SACI-2 Spin stabilized with geomagnetic control Partially filled ring Nutation Damper
Mathematical model: Satellite With a Partially Filled Ring Nutation Damper to Prevent Nutation Motion
z Hz H Hy Hx HT x y Computer Simulation
Conclusion Directional Stability: inertial pointing Gyroscopic properties of rotating bodies Major axis rule: rigid body are only idealizations Single and Dual Spinners Nutation Dampers: passive and active Spin stabilization combined with active control