Download
1 / 34
340 likes | 494 Views
NVL Sensor Fusion Test Bed. March 18, 2004. Introduction. US Army Night Vision & Electronic Sensors Directorate (NVESD) Network of acoustic and image sensors Visible and IR Classification of civilian targets. Motivation & Background. Military targets ~98%

E N D
NVL Sensor Fusion Test Bed March 18, 2004
Introduction • US Army Night Vision & Electronic Sensors Directorate (NVESD) • Network of acoustic and image sensors • Visible and IR • Classification of civilian targets
Motivation & Background • Military targets ~98% • 3 levels of fusion process, acoustic and seismic data • Current civilian classification ~80% • Improve accuracy rating • Both civilian targets and personnel classification • Image data
Objectives • Generation of data set of image and acoustic data • Development and fusion of moving target ATR algorithms • Establish methods to collect data and its “ground truth”
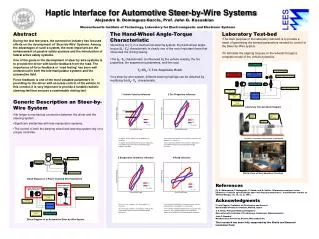
SFTB Setup SFTB Base Station Wireless Ethernet connection Commands through DOS Scripts Node 1 IR sensor Node 2 Visual sensor Met station & GPS Node 1 Acoustic sensor Node 2 Acoustic sensor GPS Node 1 Acoustic sensor Node 2 Acoustic sensor Node 3 IR sensor Node 3 Acoustic sensor GPS Node 3 Acoustic sensor GPS
Sensors • Indigo Alpha Thermal camera • Pulnix TMC-7DSP Color camera • Knowles BL-1994 Microphone
General Test Conditions (1) • 3 nodes each with hexagonal acoustical array of 7 microphones and imaging sensor • Nodes 1 & 3 have uncooled IR camera • Node 2 has visible color camera • Nodes gather information simultaneously for 3 minutes • Acoustic sensor turns on imaging sensors • MUSIC algorithm for DOA estimation
General Test Conditions (2) • Targets moving on gravel & asphalt roads • Fully exposed • Trees or other vehicles occasionally in the way • License plates on the targets are not readable • Stationary sensors • Daylight operation (9:30am to 3:30pm)
General Test Conditions (3) • Target motion • Constant speed • Stops midway • Constant acceleration, deceleration • Stops for count of ten • Each target traverses at 5, 10, 15, 20 mph • Start and stop outside FoV of nodes • Creation of different scenarios
SFTB Operation (1) • Attended mode • Short term data collection / Demo mode • Collects 4 types of data • Surveillance, directed, pan scanning • SFTB_Base.exe, FullSim.exe • Data collection mode • Pure data collection • Collects 4 types of data • Acquire.exe (Video and acoustic), MetEffects.exe
SFTB Operation (2) • Collected data • Acoustic .dat • Image .arf • Ground Truth .agt • Filenames depends on sensor, node, scenario and targets
Numbering System • SSSN00000_0000 • SSS = camera name • IN1 = Indigo IR camera 1 • IN2 = Indigo IR camera 2 • PX1 = Polinex Visible camera 1 • AC1 = Acoustic number 1 • N = node number (1-3) • 00000 = scenario number • _0000 = number indicating vehicle number (1-7) • Can have multiple numbers multiple targets
Number System Example • in1200004_0003 • In1 indigo thermal camera #1 • 2 node 2 • 00004 scenario number 4 • _0003 target 3 • ac1300001_0056 • ac1 acoustic array #1 • 3 node 3 • 00001 scenario number 1 • _0056 both targets 5 and 6
AGT Format • Very similar to a class in a high level programming language • Agt{ PrjSect {…} SenSect { SenUpd {…} } TgtSec { TgtUpd {…} }}
PrjSect • Name = “sftb” • Scenario = “00001_0001” • Site = “nvis0306”
SenSect • Denotes the sensor section of the AGT • Contains all of the SenUpd • Name = “in11” • Denotes which sensor being used
SenUpd • LatLong • Elevation • Keyword “Frame #1” • Keyword “AcousticAz: 0” • Keyword “Nodeld: 1” • Azimuth 75.9077301025 • Time 2003 160 16 22 34 587 • Fov 40.0 30.0
TgtSect & TgtUpd • TgtSect is the sector that contains all the target updates • TgtUpd • Keyword “Frame: #1” • Time 2003 160 16 22 34 587 • Tgt • Range 48.0 • TgtType “MAN” • Aspect 46.0 • PixLoc 40 63
ARF Info • Automatic target recognition working group Raster Format • Contains header, sub headers, footers, 1 or more images • Supports multiple frames • Supports 16 different image types in same file
ARF Info • Rows, cols, version, type, # frames, offset… • Colormap, comments • Image file
ImageJ • NVL used a plugin for converting image from .arf to other formats • Image processing and analysis in java • Formats – dicom, pgm, jpg, bmp, tiff, raw… • Operations – FFT, convolution, fractal box count, morphological…
Acoustic Data • Raw data in acoustic .dat file • Contains header information for system time (similar to AGT), node #, longitude/latitude (0’s), and bearing (0’s) • make_wave.py to convert from .dat to .wav • Changes to specify output file needed within the python script to make it work properly • Script drops .dat extension and adds .wav
Targets • Honda CRX (target 1) • Chevy Cavalier (target 2)
Targets • Toyota pickup (target 3) • GMC pickup (target 4)
Targets • Vehicle (?) (target 5) • Names obtained from AGT files that would eventually contain a TgtType indicating the target • Toyota 4Runner (target 6) • Stake body light truck (target 7) • Dave Rankins
Example Data • Convert arf files into raw using ImageJ • Modify raw image into PGM • Switch endianness • Apply image processing techniques to the image • Very hard to distinguish objects due to having a dark image
Example Sound Clips • Normalized data using shareware program • Target 1 • Node 1 • Node 2 • Node 3 • Target 6 • Node 1 • Node 2 • Node 3
Example Images (1) • Sensor placement • FoV of a sensor covers atleast half of total FoV
Future Work • MatLab acoustical analysis • Segmentation & shape analysis • Feature selection & extraction • Fusion • Target Recognition algorithms