Download
1 / 29
290 likes | 405 Views
Approximate Initialization of Camera Sensor Networks. Purushottam Kulkarni K.R. School of Information Technology Indian Institute of Technology, Bombay. Deepak Ganesan, Prashant Shenoy Department of Computer Science University of Massachusetts, Amherst. Field-of -view.

E N D
Approximate Initialization of Camera Sensor Networks Purushottam Kulkarni K.R. School of Information Technology Indian Institute of Technology, Bombay Deepak Ganesan, Prashant Shenoy Department of Computer Science University of Massachusetts, Amherst
Field-of -view Camera Sensor Networks • Wireless network of tetherless imaging sensors • Directional camera sensors • Applications • Ad-hoc Surveillance • Environmental and habitat monitoring • Tasks • Object detection, recognition, tracking
Camera Initialization • Pre-requisite for applications tasks • Localization, requires camera coordinates • Duty-cycling, requires set/overlap of neighbors • Tracking, requires overlap location with neighbors • Initialization parameters: • Extrinsic: location, orientation • Intrinsic: focal length, skew, principal point • Set of neighbors • Degree of overlap
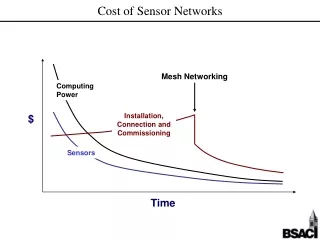
Cricket Mote sync range estimation pulse Factors Effecting Initialization • Computation Capability • Infrastructure Support • Range Estimation • Landmarks • Camera Sensor Networks • Landmarks hard to find • Resource-constraints • Estimation of accurate parameters not possible
Problem Statement • Given a CSNwith, • Limited computation capability • No/minimal infrastructure support is it possible to initialize cameras to enable applications? • Proposed solution: Approximate Initialization • Estimate relative relationships between cameras • Use only picture taking capability and local processing of camera
Outline • Introduction & Problem Statement • Approximate Initialization Parameters • Estimation Techniques • Experimental Evaluation
Approximate Initialization • Degree of Overlap • Fraction of viewing region that overlaps with neighboring cameras • k-overlap: fraction of viewing region overlapping by k cameras • Approximates level of sensing redundancy with neighboring cameras
Approximate Initialization • Region of Overlap • spatial volume within viewing region that overlaps with another camera • Degree of overlap does not estimate which portion overlaps with neighbors • Approximates location of neighbors and spatial region of overlap Approximate estimates can support application requirements
Duty-Cycling • Operate in ON-OFF cycles • d:duty-cycling parameter (ON fraction) • Oik: k-overlap of camera • Parameter in proportion to degree of overlap (extent of redundant coverage)
Triggered Wakeup • Wakeup scenarios • Object tracking • Reliable detection • Region of overlap can determine potential cameras Object C1 C2 C3
Camera 1 Camera 3 Camera 2 Estimating k-overlap • k-overlap: ratio of randomly placed reference objects viewed simultaneously by k cameras • cameras take pictures • determine if object can be viewed simultaneously by other cameras reference points viewed at camera i reference points viewed by k cameras
: 2/3 : 1/2 : 1/9 : 1/4 : 2/9 : 1/4 Skewed Distributions • Fraction of points does not represent fraction of overlap • Points in sparse region actually represent larger region • Error in estimation due to non-uniform distribution Estimated Exact Camera 1 Camera 3 Camera 2
Handling Skewed Distributions • Assign area of each polygon as weight to corresponding reference point • Weight in proportion to density of neighbors Total weight of reference points viewed at camera i Total weight of reference points viewed by k cameras
Approximate 3D Voronoi Tessellation • Accurate 3D tessellation • Compute intensive • Approximation • Discretize volume into cubes • Calculate closest reference point • Add volume to closest • Points in spare regions will have higher weights
C2 C1 Determining Region of Overlap • where the overlap exists between cameras • region of overlap is the union of cells containing all simultaneously visible points
Lens s f P(-x,-y,-f) O s’ R (unknown location) Image plane Estimating Reference Point Location • Estimate dr using object size, image size, focal length • & have same orientation • Use unit vector along and dr to estimate location
Outline • Introduction & Problem Statement • Approximate Initialization Parameters • Estimation Techniques • Experimental Evaluation
Experimental Evaluation • Simulation • 150 x 150 x 150 • Two scenarios • 4 cameras • 12 cameras • Non-uniform distribution • Fraction of objects restricted area
trigger Cyclops HostMote View Table Initialization procedure Image Grabber Object Detection Bounding Box view information Experimental Evaluation • Implementation • 8 Cyclops camera sensors • Crossbow Micaz nodes • 8ft x 6ft x 17ft
Weighted Approximation • Demonstrates non-weighted scheme shortcoming • Performs 4-6 times worse than weighted
Effect of Skew • Weighted scheme can correct for skew better • Non-weighted scheme worse by a factor of 6
Region of overlap • Error decreases with #reference points • ~22% with 12 pts/camera • 10% with 37 pts/camera • Error ~10% in region of overlap estimation
Applications Triggered Wakeup Duty-Cycling • Duty-cycling • Weighted scheme outperforms non-weighted • Triggered wakeup • 80% positive wakeups with 10 pts/camera with 2 triggers
Implementation Results • k-overlap estimation error: 2-9% • Region of overlap error: 1-11% • Approximate techniques feasible in real deployments (~10% error)
Related Work • Camera calibration • Accurate Extrinsic and Intrinsic parameters [Tsai 86], [Tsai 87], [Zhang 00] • Multimedia Sensor Networks • Panoptes: A vision sensor [Feng 03] • Audio sensors [Raykar 03] • Localization • Sensor Localization [He 03], [Savvides 01], [Whitehouse 02] • Active Badge [Harter 94], RADAR [Bahl 00], Cricket [Priyantha 00], Active Bat [Ward 97], GPS • Relative Locationing [Rao 03]
Conclusions • Proposed approximate techniques to estimate associations between cameras • Degree and region of overlap • Demonstrated use of estimates to enable applications • Error in estimations tolerable http://sensors.cs.umass.edu
Sensor platforms Image Sensors Functionality Functionality PTZ Webcam XYZ CMUcam Telos Mote Cyclops Energy Energy Technology Trends • Sensors/platforms span a large spectrum • Enable heterogeneous camera networks Stargate
Approximate Initialization • Degree of overlap • Extent of overlapping coverage • k-overlap: fraction of viewing area covered by k cameras • Region of overlap • where is the overlapping coverage • spatial region of overlap with neighboring cameras • Above estimates can support application requirements
Object Projection line Distance threshold Image Triggered Wakeup • Wakeup scenarios • Object tracking • Reliable detection • Determine best camera • Projection line • Object along this line • Reference points within distance threshold • Extent of overlap determines best camera