Download
1 / 3
30 likes | 149 Views
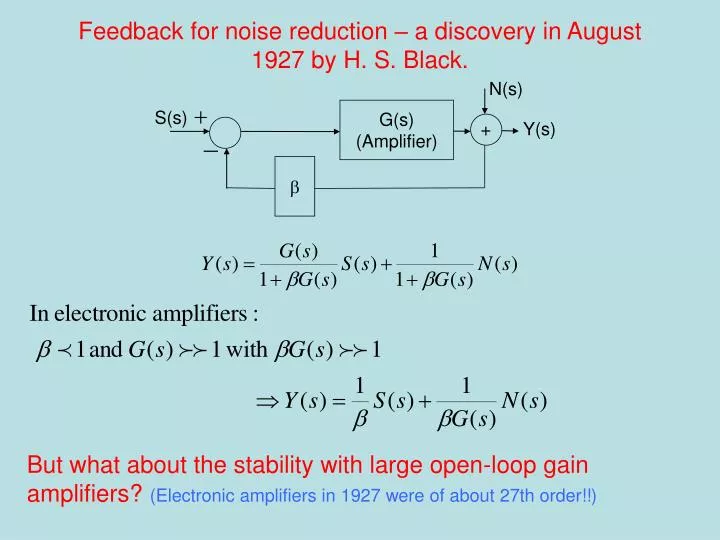
Feedback for noise reduction – a discovery in August 1927 by H. S. Black. N(s). G(s) (Amplifier). S(s). +. Y(s). . But what about the stability with large open-loop gain amplifiers? (Electronic amplifiers in 1927 were of about 27th order!!). k. G(s).

E N D
Feedback for noise reduction – a discovery in August 1927 by H. S. Black. N(s) G(s) (Amplifier) S(s) + Y(s) But what about the stability with large open-loop gain amplifiers? (Electronic amplifiers in 1927 were of about 27th order!!)
k G(s) Feedback System Stability and G(jw) • Stability of the system is given by the zeros of 1+ kG(s). This was known (for the corresponding differential equation) since 1868 from the work of James Clarke Maxwell on Governors. • If G(s) is known then it’s easy to check for the zeros of 1+kG(s) but we know only G(jw). (Electronic amplifiers of about 27th order!!) • We use the Argument Principle and for that we use the Nyquist Contour as the closed contour and map it with kG(s) to the Nyquist (or G(s))-Plane. • Number of the encirclements, by the map in the G(s)-plane, of the (-1, j0) point is equal to z – p, where z is the number of RHP zeros of 1+kG(s) and p the number of RHP poles of 1+kG(s). • The poles of 1+kG(s) are also the poles of G(s).
Nyquist Map Im(s) Im(G(s)) s-plane Re(s) Re(G(s)) Nyquist Plane • Red part of the contour is mapped using G(jw) information. • Green part is the mirror image of the red part about the real axis (why?) • The blue part is the mapping of the Rexp(j) semicircle. Nyquist Contour