Download
1 / 18
180 likes | 280 Views
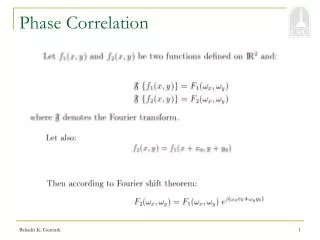
Real-Time Range Imaging by Phase-Stamp Method Using Correlation Image Sensor. Akira Kimachi 1 and Shigeru Ando 2 1 Osaka Electro-Communication University, Japan 2 The University of Tokyo, Japan. Active Range Imaging. Active range imaging — Image sensor + Active l ight

E N D
Real-Time Range Imaging by Phase-Stamp MethodUsing Correlation Image Sensor Akira Kimachi1 and Shigeru Ando2 1Osaka Electro-Communication University, Japan 2The University of Tokyo, Japan Videometrics IX, Electronic Imaging 2007, San Jose, CA, U.S.A.
Active Range Imaging • Active range imaging — Image sensor + Active light • Time-of-flight methods • Triangulation methods
Light Stripe Range Finder (LSRF) Stripe image location Depth Scan angle of sheet beam
Time Stamp LSRF (TSRF) time stamp beam angle depth • Frame-rate operation • Pixel-wise sensing • One image for one beam scan • Record a “Time Stamp” for light stripe arrival at each pixel • “VLSI silicon range finder” • Gruss et al. (1991) • Kang et al. (1994) • Yokoyama et al. (1994)
Effect of Spatially Nonuniform Reflectance/Background nonuniform surface reflectance nonuniform background illumination nonuniform surface reflectance threshold LSRF TSRF threshold nonuniform background illumination • Intensity-dependent detection of light stripe causes errors in LSRF and TSRF
Objectives • Goal — Real-time active range imaging • Frame-rate operation • Pixel-wise sensing (image processing error-free) • Robustness to spatial nonuniformity in • Surface reflectance • Background illumination • Solution —Phase-Stamp Range Finder (PSRF) • Three-Phase Correlation Image Sensor (3PCIS) • Detect the sheet beam angle by “phase stamp”
Three-Phase Time-Domain Correlation Image Sensor (3PCIS) temporal correlation average intensity S. Ando and A. Kimachi, IEEE Trans. ED (2003)
Phase-Stamp Range Finder (PSRF) • Image intensity at : Arrival time of light stripe : Object surface reflectance : Sheet beam intensity : Background light intensity • Three-phasereference signals : Frame rate
Phase-Stamp Imaging (1) Sheet beam arrives (2) Phase stamped one scan (3) Converted to beam angle one image
Real-Time Range Imaging by PSRF 3PCIS output Phase stamp Sheet beam image Total light image uncorrelated to Phase stamp image known function by design Beam angle image Range image • Frame-rate range imaging • Pixel-wise beam angle detection • Robust to spatially nonuniform reflectance/background
3PCIS Output Images in PSRF • Phase stamp image +p/2 p 0 -p/2 • Sheet beam-only intensity image • Total light intensity image : Surface reflectance : Sheet beam intensity : Background intensity
Experimental PSRF System • 3PCIS camera • 200x200 pixels • Frame rate @12.5 fps • Sheet beam • 7 mW laser diode • Cylindrical lens • Scanning mirror@25 scans/s • Reference signals • PC+D/A board • @50 Hz • Camera and geometry calibration • Based on Zhang’s method Reference signals Sheet beam angle
Real-Time 3D Video Capture Sheet beam intensity Total light intensity Phase stamp
3D Imaging Examples left thumb & palm 40 mm 40 mm 23 mm 17 mm cone-shaped surface
3D Measurement Accuracy 3D surface plot • Flat object @540 mm from the camera +p/2 p 0 -p/2 phase stamp sheet beam total light
Nonuniform Background Illumination total light sheet beam phase stamp
Nonuniform Surface Reflectance total light sheet beam phase stamp
Conclusions • Phase-stamp range finder using the 3PCIS • Frame-rate operation • Pixel-wise sensing • Robustness to spatial nonuniformity in • Surface reflectance • Background illumination • Evaluation by an experimental system • Real-time range imaging @12.5 fps • Accuracy (@540mm) • Deviation — 2.35 mm → fixed pattern noise (~4 deg) removal • Systematic error — -1.96 mm → geometry calibration