Download
1 / 7
70 likes | 252 Views
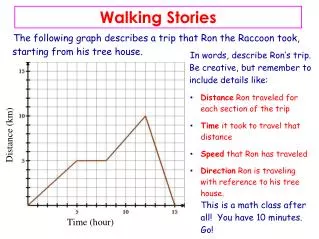
Walking. Kinematic control. Legs and upper body controlled kinematically. Dynamic simulation. Legs affect upper body. Legs react to forces imparted by upper body. Torques control legs in attempt to match kinematic control. Walking. Pelvic rotation over point of contact.

E N D
Walking Kinematic control Legs and upper body controlled kinematically Dynamic simulation Legs affect upper body Legs react to forces imparted by upper body Torques control legs in attempt to match kinematic control
Walking Pelvic rotation over point of contact Pelvic rotation about vertical axis Pelvic list Knee flexion Toe hinge
Walking: Phases RTL LHD RHD LTL Double support Single support Double support Right stance phase Left swing phase One-half cycle
Walking: kinematics • Specify joint angle functions of time for each joint • Empirical clinic data • Designed by the animation • Specify time-space curves for pelvis and feet • Use inverse kinematics to position leg at each time step
Walking: dynamics • Kinematically control some parameters • Use dynamics to fill in rest of parametric values • Dynamic simplifications • Ignore some dynamics, e.g. swing leg on balance • Ignore temporal variations, e.g., upward force of stance leg • Replace complexes by simpler ones, e.g., leg by telescoping joint • Decouple forces and sum affect, e.g. hor. and vert. components
Dynamcis for animation Aid to the animator, not an obstacle Can be easily overridden Kinematics used as hard or soft constraints
Walking: forward dynamics Phase changes induce joint torques Simulates body sensors turning on/off muscles Can use empirically collected data (gait lab data)