Download
1 / 17
170 likes | 367 Views
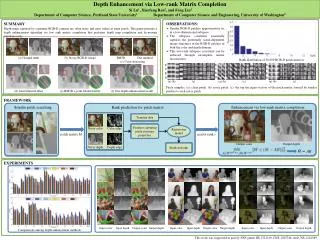
Depth Enhancement via Low-rank Matrix Completion and Travel Report in Wien. Computer Vision Lab. School of Information and Communications GIST. Depth enhancement?. Low-rank matrix completion. Ground truth. RGB-D input. Enhanced depth map. With missing and noisy disparity values.

E N D
Depth Enhancement via Low-rankMatrix Completion andTravel Report in Wien Computer Vision Lab. School of Information and Communications GIST
Depth enhancement? Low-rank matrix completion Ground truth RGB-D input Enhanced depth map With missing and noisy disparity values
Previous approaches • Edge-preserving filters • Joint bilateral filter (2007) • Weighted median filter (2013) • … • Global optimization on MRFs • Graph Cuts (2005) • Belief propagation • …
Patch matrix? (1/2) A reference patch(RGB-D) The nearest neighbor(inside the image) [ ] M= + Vectorized reference patchof length 49x4 Vectorized k-neighbors
Patch matrix? (2/2) • Distance function • The size of a patch is 7x7, alpha is set as 0.4, and beta is set as 30. Depth differences (depth is shifted) Color difference
Decomposition of patch matrices • (a): ground truth • (b): noisy patch • (c): Eigen vectorsin the decreasing order of singular values Underlying structures are captured in a sub-space
Low rank sub-matrices (1/3) • A patch matrix M can be well approximated by a matrix with a very low rank. 4m2 x k 4m2 x r 4m2 x k x = r x k Clean and completepatch matrix (output) Patch matrix(input) Low-rank sub-matrices In the paper, M is 196 x 40 matrix
Low rank sub-matrices (3/3) • They verified this idea with randomly selected 30,000 patches, and showed 99.7% of patches are approximated properly with a rank below 7. • The subspace constraint essentially captures correct scene structures!!!
Low rank sub-matrices (2/3) • How to obtain low-rank sub-matrices? • SVD (if M is complete), incomplete matrix factorization methods (Damped Newton method, alternation method), etc. 4m2 x k U Σ VT = 4m2 x 4m2 4m2 x k k x k or
How to determine the rank? • Learning-based approach • Number of edge pixels • Edge-difference between the nearest and furthest patches • Variance of the edge differences • Pixel value variance • Constitute 4-D feature vectors and train using the parabola regression method.
Results (2/2) • Evaluation of the proposed method in terms of PSNR.
Research • Alpha matting, ECCV 2014 • Light field stereo matching, still working. • Post-processing, ECCV 2014