Download
1 / 35
350 likes | 583 Views
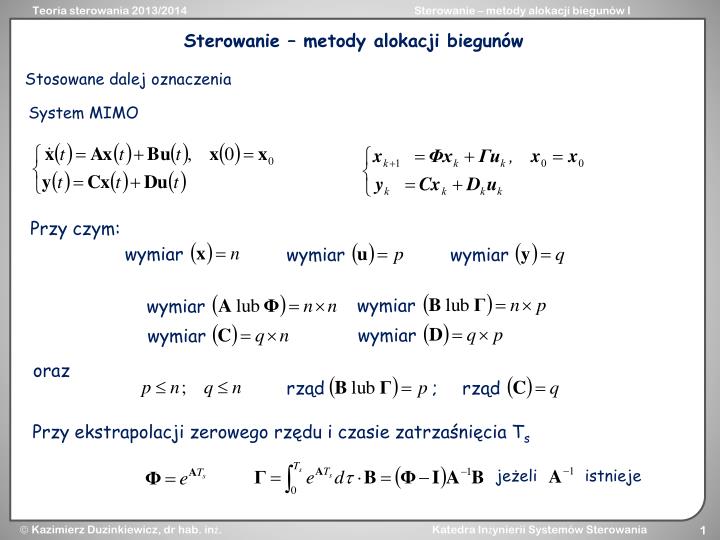
Sterowanie – metody alokacji biegunów. Stosowane dalej oznaczenia. System MIMO. Przy czym:. wymiar. wymiar. wymiar. wymiar. wymiar. wymiar. wymiar. rząd ;. rząd. oraz. Przy ekstrapolacji zerowego rzędu i czasie zatrzaśnięcia T s. jeżeli istnieje.

E N D
Sterowanie – metody alokacji biegunów Stosowane dalej oznaczenia System MIMO Przy czym: wymiar wymiar wymiar wymiar wymiar wymiar wymiar rząd ; rząd oraz Przy ekstrapolacji zerowego rzędu i czasie zatrzaśnięcia Ts jeżeli istnieje
Będziemy rozważali zasadniczo przypadki, kiedy Sformułowanie problemu : macierz systemu, stała, rzeczywista, wymiaru , gdzie: tzn. : wektor stanu, rzeczywisty, wymiaru , tzn. : wektor wejścia, rzeczywisty, wymiaru , tzn. : macierz wejścia, stała, rzeczywista, wymiaru , tzn. : wektor wyjścia lub obserwacji, rzeczywisty, wymiaru , tzn. : macierz wyjścia lub obserwacji, stała, rzeczywista, wymiaru , tzn.
Zadanie sterowania: System będący w chwili początkowej ( dla systemów stacjonarnych) w stanie początkowym , należy przeprowadzić do pożądanego stanu końcowego, lub operacyjnego , zapewniając w stanie przejściowym spełnienie określonych wymagań dynamicznych takich jak np. czas narastania, przeregulowania, oscylacyjność … . Po osiągnięciu stanu operacyjnego , wartość wyjścia musi być zwykle równa narzuconej wartości zadanej Propozycja rozwiązania: Na system działają dwie wielkości zewnętrzne - stan początkowy - sygnał wartości zadanej Przesłanie zwrotne wektora stanu na wejście z wykorzystaniem macierzy sprzężenia zwrotnego od stan - działanie regulacyjne Przesłanie w przód wektora wartości zadanej na wejście z wykorzystaniem macierzy sprzężenia w przód - działanie śledzące
Rozwiązanie Obiekt Przypadek ciągły: Macierz kompensacji wzmocnień statycznych (macierz sprzężenia w przód) Sterownik (prawo sterowania)
Równania opisujące system zamknięty: Stąd: Równanie stanu systemu zamkniętego i macierz systemu zamkniętego CL – closeloop oraz macierz wejścia Przypomnienie: na system działają dwie wielkości zewnętrzne - stan początkowy - sygnał wartości zadanej
Rozważamy systemy liniowe – zasada superpozycji upoważnia do rozdzielnego rozważania Przypadek ciągły – działanie regulacyjne Działanie regulacyjne ma na celu przeprowadzenie wektora stanu systemu ze stanu początkowego do stanu operacyjnego (końcowego) przy zadanych warunkach Będzie to wynikać z odpowiedniego doboru macierzy tego przejścia i/lub osłabieniu wpływu zakłóceń tak, aby osiągnąć stan ustalony Dla obliczenia macierzy przyjmujemy (zgodnie z zasadą superpozycji) Równanie Redukuje się do postaci Wymaganie minimalne – stabilność: wszystkie wartości własne macierzy w lewej półpłaszczyźnie - zapewnienie odwracalności i osiągnięcie stanu równowagi
Macierz jest stałą macierzą o wymiarze i nazywana jest macierzą wzmocnień sterownika Cechy: - w skrajnym przypadku ma elementów, - jako macierz stała związana ze stanem pełni rolę sterownika proporcjonalnego - poprzez związek pełni też rolę sterownika różniczkującego - nie daje sprzężenia o charakterze całkującym
Przypadek ciągły – działanie śledzące Działanie śledzące ma na celu uzyskanie w stanie ustalonym ( ) spełnienie warunku Równanie stanu systemu zamkniętego sprowadza się do stąd Równanie wyjścia systemu zamkniętego przyjmuje postać stąd - warunek jednostkowego wzmocnienia
Przypadek p = q (wymiar p wektora sterowań u = wymiar q wektora wyjścia y) Macierz kwadratowa i jeżeli odwracalna Uwaga 1: macierz wzmocnień jest równa odwrotności wzmocnienia statycznego systemu zamkniętego (liczonego od uM do y) Równania opisujące ten system zamknięty: Stąd: Równanie stanu tego systemu zamkniętego i macierz tego systemu zamkniętego oraz macierz wejścia
Macierz transmitancji systemu opisywanego równaniem stanu określona jest , U nas , stąd Wzmocnienie statyczne
Macierz kompensacji wzmocnienia statycznego jest idealna tylko, Uwaga 2: jeżeli parametry systemu, których zależy, są dokładnie znane i nie zmieniają się w czasie. Kompensacja niespełnienia tych dwóch wymagań – dodanie członu całkującego w pętli sterowania (później !!!) Przypadek p q (wymiar p wektora sterowań u wymiar q wektora wyjścia y) Najczęściej: p < q Macierz nie może być określona poprzez obliczenie macierzy odwrotnej Wymaganie jednostkowości wzmocnienia określonego zależnością można zastosować jedynie do dostępnych sterowań i odpowiadających wyjść i wartości zadanych Gdy: p > q Można przeciwnie odrzucić stosowanie wymagania jednostkowości dla p – q dostępnych sterowań
Rozwiązanie Przypadek dyskretny: Obiekt Opóźnienie Macierz kompensacji wzmocnień statycznych (macierz sprzężenia w przód) Sterownik (prawo sterowania)
Równania opisujące system zamknięty: Stąd: Równanie stanu systemu zamkniętego i macierz systemu zamkniętego CL – closeloop oraz macierz wejścia
Przypadek dyskretny – działanie regulacyjne Podobnie jak w przypadku ciągłym, przyjmujemy Problem sterowania sprowadza się do określenia sekwencji wartości otrzymywanych dla z zależności , która przeprowadzi system ze stanu początkowego w stan końcowy
Przypadek dyskretny – działanie śledzące Działanie śledzące ma na celu uzyskanie w stanie ustalonym ( ) spełnienia warunku Równanie stanu systemu zamkniętego sprowadza się do stąd Równanie wyjścia systemu zamkniętego przyjmuje postać stąd - warunek jednostkowego wzmocnienia
jeżeli p = q: Podobnie: macierz wzmocnień jest równa odwrotności wzmocnienia statycznego systemu zamkniętego (liczonego od uM do y) Wzmocnienie statyczne
Przykład 1 – mały silnik p.s. z obciążeniem inercyjnym i pomijalną indukcyjnością obwodu twornika i sztywnym wałem (patrz budowa modelu – wykład z MiI) k = , L = 0 Zmienne modelu: - zmienne stanu - zmienna wyjścia
Równania stanu w postaci macierzowej: Równania wyjścia w postaci macierzowej: Schemat blokowy analogowy modelu silnika PS
Silnik używany do sterowania położeniem kątowym lub liniowym Przykład – pozycjonowanie głowicy plotera Model w postaci nie-macierzowej Transformacja Laplace’a
gdzie, - wzmocnienie w torze napięcie – położenie, - stała czasowa silnika W wielu przypadkach
Wówczas i Równania stanu dla tych warunków Chcemy umieścić wartości własne systemu zamkniętego w określonych miejscach Pożądany obszar alokacji biegunów systemu zamkniętego Linie stałej wartości współczynnika tłumienia i pulsacji drgań nietłumionych systemu rzędu drugiego
Wybierzmy Postulowany wielomian charakterystyczny systemu zamkniętego Jest to też wielomian charakterystyczny macierzy systemu zamkniętego Równania opisujące system zamknięty: Stąd Równanie stanu systemu zamkniętego i macierz systemu zamkniętego
Wielomian charakterystyczny macierzy systemu zamkniętego wyrażony przez parametry systemu W przykładzie Stąd
Z porównania dwóch wielomianów charakterystycznych i stąd Wybierając możemy określić Z klasycznej teorii: odwrotność stałej czasowej – pulsacja załamania
Dla systemu drugiego rzędu oraz Gdyby np. pulsacja drgań nietłumionych miałaby być pięciokrotnie większa od pulsacji załamania, a współczynnik tłumienia stąd i wzmocnienia
Przykład 2 – system mechaniczny rzędu drugiego Model - masa - współczynnik sprężystości - współczynnik tłumienia - siła zewnętrzna Zmienne stanu Równania stanu
Jeżeli przyjąć jako wejście przyśpieszenie ruchu Jeżeli przyjąć jako wejście przyśpieszenie ruchu – macierz systemu i macierz wejścia Wyprowadzając jak w Przykładzie 1 transmitancję - pulsacja drgań nietłumionych i współczynnik tłumienia wyniosą
Postępując dalej podobnie jak w przykładzie 1 - wielomian charakterystyczny z drugiej strony gdzie Z porównania dwóch wielomianów charakterystycznych
Jeżeli chcemy, aby system zamknięty był „wolniejszy” od systemu oryginalnego Wartość będzie ujemna Obliczenia numeryczne dla danych Macierz systemu i macierz wejścia Wartości własne, pulsacja drgań nietłumionych i współczynnik tłumienia
System bardzo słabo tłumiony – celem sterowania może być zwiększenie tłumienia Jeżeli przyjąć wówczas
Wyniki symulacji Bez sprzężenia Ze sprzężeniem