Download
1 / 11
110 likes | 225 Views
Edward C. Jordan Memorial Offering of the First Course under the Indo-US Inter-University Collaborative Initiative in Higher Education and Research: Electromagnetics for Electrical and Computer Engineering. by Nannapaneni Narayana Rao

E N D
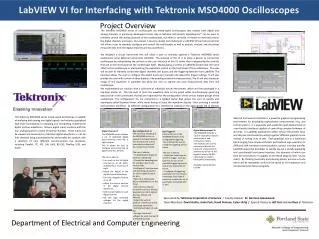
Edward C. Jordan Memorial Offering of the First Course under the Indo-US Inter-University Collaborative Initiative in Higher Education and Research: Electromagnetics for Electrical and Computer Engineering by Nannapaneni Narayana Rao Edward C. Jordan Professor of Electrical and Computer Engineering University of Illinois at Urbana-Champaign Urbana, Illinois, USA Amrita Viswa Vidya Peetham, Coimbatore July 10 – August 11, 2006
3.6 • Polarization of Sinusoidally • Time-Varying Fields
Polarization is the characteristic which describes how the position of the tip of the vector varies with time. • Linear Polarization: • Tip of the vector • describes a line. • Circular Polarization: • Tip of the vector • describes a circle.
Elliptical Polarization: • Tip of the vector • describes an ellipse. • (i) Linear Polarization • Linearly polarized in the x direction. Direction remains along the x axis Magnitude varies sinusoidally with time
Direction remains along the y axis Magnitude varies sinusoidally with time Linearly polarized in the y direction. If two (or more) component linearly polarized vectors are inphase, (or in phaseopposition), then their sum vector is also linearly polarized. Ex:
(ii)Circular Polarization • If two component linearly polarized vectors are • (a) equal to amplitude • (b) differ in direction by 90˚ • (c) differ in phase by 90˚, • then their sum vector is circularly polarized.
(iii)Elliptical Polarization • In the general case in which either of (i) or (ii) is not satisfied, then the sum of the two component linearly polarized vectors is an elliptically polarized vector. • Ex:
D3.17 • F1 and F2 are equal in amplitude (= F0) and differ in direction by 90˚. The phase difference (say f) depends on z in the manner –2pz – (–3pz) = pz. • (a) At (3, 4, 0), f = p(0) = 0. • (b) At (3, –2, 0.5), f = p(0.5) = 0.5 p.
(c)At (–2, 1, 1), f = p(1) = p. • (d) At (–1, –3, 0.2) = f = p(0.2) = 0.2p.