Download
1 / 28
320 likes | 672 Views
Cap4 DC-DC Motor Drive. INEL 5408 Control de Motores Prof. A. Díaz PhD. Contenido. Introducción Principio de operación de los chopper Chopper de cuatro cuadrante Operación primer cuadrante Operación segundo cuadrante Operación tercer cuadrante Operación cuarto cuadrante. Introducción.

E N D
Cap4 DC-DC Motor Drive INEL 5408 Control de Motores Prof. A. Díaz PhD
Contenido • Introducción • Principio de operación de los chopper • Chopper de cuatro cuadrante • Operación primer cuadrante • Operación segundo cuadrante • Operación tercer cuadrante • Operación cuarto cuadrante Cap4. DC-DC Motor control Drive
Introducción • Cuando la fuente de voltaje que entra al controlador es DC entonces el convertidor tiene que ser un DctoDcconverter. • Esta fuente puede provenir de una bateria, celdas solares, o rectificadores. Cap4. DC-DC Motor control Drive
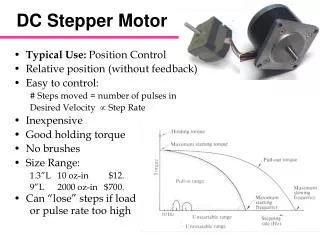
Operación del DC to DC • Un dispositivo semiconductor como IGBT, FET, BJT, or SCR es encendido (saturación) o apagado completamente (corte) como si fuera un interruptor. • El voltaje promedio aplicado a la carga es igual al voltaje de la fuente multiplicado por el tiempo de encendido y divido por el tiempo total del periodo: Cap4. DC-DC Motor control Drive
Chopper cuatro modo Operación básica • Este puente de transistores y diodos en paralelo es capaz de operar el motor DC en los cuatros modos antes estudiados: fowardmotoring, fowardbreaking, reverse motoring, reverse breaking. • Los transistores son encendido con alguna señal de control aplicada a su base y referida a su emisor. • El motor se representa por su resistencia, Inductancia y voltage EMF. • Tanto la inductancia como el EMF juegan un papel importante en la conduccion de cada transistor o diodo. Cap4. DC-DC Motor control Drive
Operación primer cuadrante En el periodo ton donde la corriente en la armadura crece los transistores T1 y T2 se encienden Luego T1 se apaga y se mantiene conduciendo T2. Esto ocasiona que el inductor junto con EMF hagan conducir al diodo D4, manteniendo el voltaje de armadura en cero y la corriente circulando en la misma dirección pero decreciente. Cap4. DC-DC Motor control Drive
Gráficas primer cuadrante En modo continuo el inductor mantienen circulando la corriente todo el tiempo de toff, por lo que la corriente de armadura no se hace cero. La corriente de la fuente si se hace cero durante toff En el modo discontinuo la corriente de armdura se hace cero antes de que comienze el proximo ton. Despues que la corriente se hace cero el voltaje a travez de la armadura se hace igual a EMF. Este modo se caracteriza por tener mayor rizado en la corriente y el torque y mayor dificutlat en los caldculos. Cap4. DC-DC Motor control Drive
Operación segundo cuadrante Operación segundo cuadrante Este modo opera como un boost. Para elevar la corriente en el inductor se enciende T2. En este momento el voltaje de armadura es cero. Luego se apaga T2 y el inductor junto la EMF forzan la corriente a travez de de D3 y D4 hacial la fuente. Durante este perido la corriente en el inductor se reduce. Gráficas La corriente de la fuente es cero durante ton y luego es inversa decreciente dutanteToff. Cap4. DC-DC Motor control Drive
Operación tercer cuadrante Este es el modo en que el motor corre en reversa. Durante ton los transistores T3 y T4 se encienden. El voltaje de armadura es igual al de la fuente y la corriente crece. Durante toff el transistor T4 se apaga y el inductor fuerza la corriente a través de D1, En este momento la corriente continua circulando en la misma dirección pero decreciendo. El voltaje en la armadura es cero. Si la corriente no se llega a cero durante este periodo entonces se esta en modo continuo Cap4. DC-DC Motor control Drive
Gráficas tercer cuadrante El voltaje de armadura cambia entre negativo y cero. La corriente es negativa y nunca sube a cero. La corriente de la fuente es negativa durante To y luego es igual a cero El inductor no es capaz de mantener la corriente circulando todo e l tiempo para un determinado dutycycle . Durante este tiempo que la corriente se hace cero el voltaje de armadura se iguala al voltaje EMF. Los rizados de corriente y torque se acentúan en este modo de operación. Cap4. DC-DC Motor control Drive
Cuarto Cuadrante Este modo se utiliza para frenar el motor cuando esta en reversa. En este modo opera T4 y D2 para elevar la corriente en el inductor y luego se apaga T4 quedándole como único camino D1, D2 para descargar hacia la fuente. Este momento la corriente decrece (valor absoluto) acercándose a cero. Si el inductor puede mantener la corriente circulando durante todo toff entonces se opera en modo continuo. Generalmente se comienza en modo continuo pero cuando el motor va perdiendo energía cinética y la EMF decrece entonces se va cayendo en modo discontinuo. Gráficas Cap4. DC-DC Motor control Drive
Utilizando otros dispositivos Rango de potencia Menos de 50KW BJT MOSFET Mayor de 50KW IGBT GTO SCR, SCR • Los transistores Bipolares se pueden sustituir por MOSFET, IGBT en incluso GTO SCR, y SCR. • Los primeros 3 se pueden encender y apagar fácilmente pero el cuarto SCR hay que crearle un sistema especial de conmutación para apagarlos. Sin embargo para altas potencias son los únicos que se pueden usar. Cap4. DC-DC Motor control Drive
Modelando el convertidor Ganancia Kr. Constante de tiempo Tr El retraso de la señal esta relacionado con la frecuencia de interrupción fs. Este tiempo Tr se considera la mitad de Ts=1/fs. Por lo tanto la función de transferencia del convertidor es: Si la frecuencia es lo suficientemente alta y el tiempo Ts resulta mucho menor que las otras constantes del sistema se podría considerar la función de transferencia del convertidor como una constante Kr • El convertidor recibe la señal de control Vcm generalmente en niveles de voltaje pequeño (10-24V), Esta señal se convierte en ancho de pulso de 0-1 que corresponde de 0 a T. El voltaje de salida aparece multiplicado en el rango de 0-Vs. Por lo tanto la ganancia K del DC-DC corresponde a: Cap4. DC-DC Motor control Drive
Ejemplo: función de transferencia del DC-DC converter Un DC-DC converter es alimentado con un voltaje de línea trifásico de 240V. El convertidor tiene un frecuencia de oscilación de 20KHz y es tiene un voltaje de control de 15Vdc. Calcule la función de transferencia. Cap4. DC-DC Motor control Drive
Entrada al convertidor • La entrada mas común al convertidor es un puente rectificador (Generalementetrifasico). • Esta entrada tiene la ventaja de que el factor de potencia es alto. Pero a la misma vez no ofrece alternativa para operar en el segundo cuadrante debido a que la corriente no se puede invertir. Aquí aparece un rectificador un filtro y una resistencia para descargar la corriente inversa durante la operación en modo II. Cap4. DC-DC Motor control Drive
Usando rectificador y operando el segundo cuadrante • Si se quiere operar en el segundo cuadrante enviando la energia hacia la fuente se utiliza un convertidor de control de fase donde los tiristores permitan circular la corriente en inverso. Cap4. DC-DC Motor control Drive
Convertidor un cuadrante • Este es el clásico buckconverter. • Durante ton el transistor conduce aumentando la corriente en el inductor y el motor. • Durante toff el inductor mantiene la corriente circulando a través de D2. Cap4. DC-DC Motor control Drive
Convertidor dos cuadrantes (1) • Para operar en el primer cuadrante (buck) se enciende T1 durante ton, luego D4 conduce durante toff. • Para el segundo cuadrante T4 opera en ton y D1 en Toff Este cuadrante tiene la ventaja que el diodo puede estar integrado junto con el transistor en un solo modulo. Cap4. DC-DC Motor control Drive
Convertidor dos cuadrantes (2) • Para el cuadrante I se enciende T1 y T2 durante on en off operan T2,D4, similar al convertidor de 4 cuadrantes. • Para operar en el segundo cuadrante T2 y d4 operan en el ton y luego D4y D3 en el Toff. Este convertidor difiere del anterior en que los diodos y los transistores estan separados,, y que siempre estan operando dos dispositivos a la vez creando mayor caída en serie. Cap4. DC-DC Motor control Drive
Análisis en estado estable • El rizado en la corriente y torque en el motor debido a la conmutación, no causa trabajo neto en el motor (Solo perdida). A mayor frecuencia esto tiene menos influencia todavía. • Por lo tanto trabajar con los valores promedios de voltaje y corriente proporciona bastante precisión a la vez que simplifica el análisis. Las ecuaciones del motor utilizando estos valores promedios son Cap4. DC-DC Motor control Drive
Ecuación de torque promedio Pu • Uniendo las ecuaciones anteriores podemos tener una ecuación para el torque promedio igual a: Quedando una expresión de torque desarrollado por unidad donde. El torque por unidad se puede encontrar dividiendo el torque average entre el torque base. Cap4. DC-DC Motor control Drive
Característica torque velocidad en función del dutycycle • El torque y la velocidad cambian linealmente para un dutycyle fijo. • También se puede apreciar que la velocidad para un mismo torque cambia linealmente con d. • De la misma manera torque cambia linealmente con d para una velocidad fija. Cap4. DC-DC Motor control Drive
Análisisis corriente instantanea • Durante el transiente la ecuación de corriente se define por la ecuación diferencial para ton • Cuya solución • Durante toff la ecucion es • Cuya solución es • Donde Cap4. DC-DC Motor control Drive
Conducción continua • Para encontrar el valor de Iao e Ia1 utilizamos la condición frontera • Resolviendo para Iao e Ia1 obtenemos El dutycycle crítico que separa la conducción continua de la discontinua se calcula haciendo Iao=0 y despejando para d. Cap4. DC-DC Motor control Drive
Conducción discontinua • En este modo la corriente se hace cero antes de comenzar el próximo ton. Cap4. DC-DC Motor control Drive
Ejemplo de control DC-DC Un motor DC is controlador por un DC to Dc converter que se alimenta con un voltaje de 24V a una frecuencia de 1KHz. Encuentre la variación de dutycycle que hay que tener para variar la velocidad de 0 a 1 pu. Las especificaciones del motor son : 1hp, 10V, 2500 rpm, 78.5% efficiencia, Ra=0.01 ohm, La=0.002 H, Kb=0.03819 V/rad/sec Considere la caída a travéz de los diodos de 1V independientemente de la corriente. Método: se calculan los valores Vb,Vn,Wmr,Iar,Ran,Ten para utilizarse en la expresion de d=(TenRan+wmn)/Vn. Cap4. DC-DC Motor control Drive
Ejemplo de DC en función de f • Grafique el duty cycle crítico en función de la frecuencia para diferente valores de E/Vs. Como se muestra en la figura el dc se mantiene constante para frecuencias fcTa>5 y muy parecido a E/Vs Cap4. DC-DC Motor control Drive
Ejemplo de Corriente y Torque average • Un motor de 200hp,230V,500 rpm excitado separadamente es controlado por un Chopper. • Este esta conectado a un rectificador trifásico que se alimenta con 230V, 60Hz. Los parámetros del motor son: Ra=0.04ohm, La=0.0015H, Kb=4.172 V/rad/sec, fc=2Khz • El motor esta corriendo a 300 rpm a 55% duticycle, determine la corriente average y el torque average. • Metodo: se encuentra (Ta,T,Ta/T,Vs,E) para hallar dutycycle critico y determinar si esta en modo continuo. • Luego se encuentra Iao e Ia1. Luego se encuentra Iav integrando las ecuaciones de Ia(ton y toff). Con este valor • Se encuentra el valor de Tav=Kiav. Luego se halla la corriente Iav con steadystatedVs-KbWm/Ra y se compara con el valor hallado con los valores instantaneos. Cap4. DC-DC Motor control Drive