Download
1 / 1
10 likes | 128 Views
A MOVEMENT CONTROL SYSTEM FOR ROMAN POTS AT THE LHC

E N D
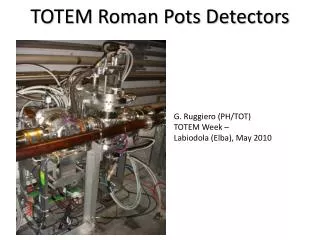
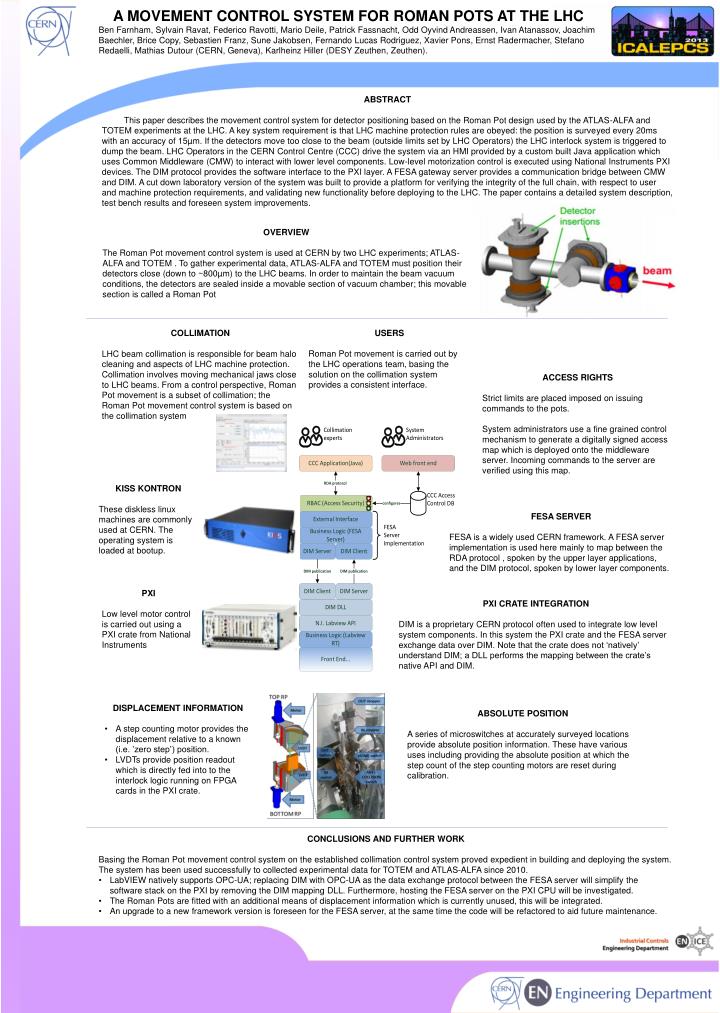
A MOVEMENT CONTROL SYSTEM FOR ROMAN POTS AT THE LHC Ben Farnham, Sylvain Ravat, Federico Ravotti, Mario Deile, Patrick Fassnacht, Odd Oyvind Andreassen, Ivan Atanassov, Joachim Baechler, Brice Copy, Sebastien Franz, Sune Jakobsen, Fernando Lucas Rodriguez, Xavier Pons, Ernst Radermacher, Stefano Redaelli, Mathias Dutour (CERN, Geneva), Karlheinz Hiller (DESY Zeuthen, Zeuthen). ABSTRACT This paper describes the movement control system for detector positioning based on the Roman Pot design used by the ATLAS-ALFA and TOTEM experiments at the LHC. A key system requirement is that LHC machine protection rules are obeyed: the position is surveyed every 20ms with an accuracy of 15µm. If the detectors move too close to the beam (outside limits set by LHC Operators) the LHC interlock system is triggered to dump the beam. LHC Operators in the CERN Control Centre (CCC) drive the system via an HMI provided by a custom built Java application which uses Common Middleware (CMW) to interact with lower level components. Low-level motorization control is executed using National Instruments PXI devices. The DIM protocol provides the software interface to the PXI layer. A FESA gateway server provides a communication bridge between CMW and DIM. A cut down laboratory version of the system was built to provide a platform for verifying the integrity of the full chain, with respect to user and machine protection requirements, and validating new functionality before deploying to the LHC. The paper contains a detailed system description, test bench results and foreseen system improvements. OVERVIEW The Roman Pot movement control system is used at CERN by two LHC experiments; ATLAS-ALFA and TOTEM . To gather experimental data, ATLAS-ALFA and TOTEM must position their detectors close (down to ~800µm) to the LHC beams. In order to maintain the beam vacuum conditions, the detectors are sealed inside a movable section of vacuum chamber; this movable section is called a Roman Pot USERS Roman Pot movement is carried out by the LHC operations team, basing the solution on the collimation system provides a consistent interface. COLLIMATION LHC beam collimation is responsible for beam halo cleaning and aspects of LHC machine protection. Collimation involves moving mechanical jaws close to LHC beams. From a control perspective, Roman Pot movement is a subset of collimation; the Roman Pot movement control system is based on the collimation system ACCESS RIGHTS Strict limits are placed imposed on issuing commands to the pots. System administrators use a fine grained control mechanism to generate a digitally signed access map which is deployed onto the middleware server. Incoming commands to the server are verified using this map. KISS KONTRON These diskless linux machines are commonly used at CERN. The operating system is loaded at bootup. FESA SERVER FESA is a widely used CERN framework. A FESA server implementation is used here mainly to map between the RDA protocol , spoken by the upper layer applications, and the DIM protocol, spoken by lower layer components. PXI Low level motor control is carried out using a PXI crate from National Instruments PXI CRATE INTEGRATION DIM is a proprietary CERN protocol often used to integrate low level system components. In this system the PXI crate and the FESA server exchange data over DIM. Note that the crate does not ‘natively’ understand DIM; a DLL performs the mapping between the crate’s native API and DIM. • DISPLACEMENT INFORMATION • A step counting motor provides the displacement relative to a known (i.e. ’zero step’) position. • LVDTs provide position readout which is directly fed into to the interlock logic running on FPGA cards in the PXI crate. ABSOLUTE POSITION A series of microswitches at accurately surveyed locations provide absolute position information. These have various uses including providing the absolute position at which the step count of the step counting motors are reset during calibration. • CONCLUSIONS AND FURTHER WORK • Basing the Roman Pot movement control system on the established collimation control system proved expedient in building and deploying the system. The system has been used successfully to collected experimental data for TOTEM and ATLAS-ALFA since 2010. • LabVIEW natively supports OPC-UA; replacing DIM with OPC-UA as the data exchange protocol between the FESA server will simplify the software stack on the PXI by removing the DIM mapping DLL. Furthermore, hosting the FESA server on the PXI CPU will be investigated. • The Roman Pots are fitted with an additional means of displacement information which is currently unused, this will be integrated. • An upgrade to a newframework version is foreseen for the FESA server, at the same time the code will be refactored to aid future maintenance.