Download
1 / 25
250 likes | 384 Views
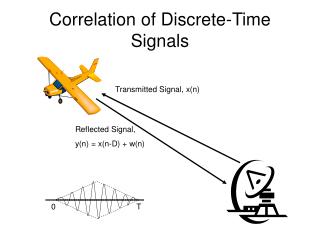
ECE 662- Project Presentation “ Discrete-Time - Optimal Control of a Telerobotic System ”. Alireza Mohammadi Department of Electrical and Computer Engineering University of Alberta 1 April 2010. Telerobotic Systems. Robotic by remote control (Look at following figure from [2]);

E N D
ECE 662- Project Presentation“Discrete-Time - Optimal Control of a Telerobotic System” AlirezaMohammadi Department of Electrical and Computer Engineering University of Alberta 1 April 2010
Telerobotic Systems • Robotic by remote control (Look at following figure from [2]); • Telerobotic systems are used to extend “a person’s sensing and manipulation capability to a remote location.”[1]
Standard Telerobotic Systems • Slave robot responds to human operator’s commands who is interacting with the master device (joystick/manipulator). Slave device interacts with the remote environment. (Look at following block diagram from [2].)
Unilateral VS. Bilateral Telerobotic Systems • In a unilateral telerobotic system we don’t have any force/velocity feedbacks from the slave side, we just use visual and audio feedback from the slave side; unilateral flow of power variables (velocity/force) from master to slave. • In a bilateral telerobotic system interaction forces with the remote environment are reflected back to the human operator. • Advantage: Human operator can use his/her tactile senses to perform the remote task efficiently like telesurgery; • Disadvantage: Even a small amount of time delay in communication channel destabilizes our system; slave starts oscillating or even moving madly!
Design Specifications for a Unilateral Telerobotic System • Internal/closed loop stability; • Master compliance, i.e. master velocity should be a desired function of , ; • Free motion tracking, i.e. slave should be able to follow master motions when there is no contact with the remote environment, .
Leung et al. [1] Proposed Method for CT Control of Telerobotic Systems • Two-step design for a unilateral telerobotic system; • For a unilateral telerobotic system: • An optimal controller to achieve master compliance; • An optimal controller to achieve free motion tracking.
How to Connect them Using Analysis and Synthesis Toolbox systemnames = ' Pm Wm1 Wm2 Wm3 F '; inputvar = '[fh ; dm1 ; tau_m1]'; outputvar = '[Pm ; fh-Pm ; Wm1 ; Wm2 ; F]'; input_to_Pm = '[fh-tau_m1]'; input_to_Wm1 = '[fh-Pm]'; input_to_Wm2 = '[tau_m1]'; input_to_Wm3 = '[dm1]'; input_to_F = '[Pm+Wm3]'; sysoutname = 'CTMasterOpenLoop'; cleanupsysic = 'yes'; sysic; F: Anti-aliasing filter used to before sampler in the SD control of the master robot
DT control • Analog design and SD implementation: • SIT of designed CT controller; • BT of designed CT controller. • Direct design in discrete domain: • SIT of open-loop system: Gd=SGH; • Apply techniques we learnt to the DT open loop system.
Example • Master robot : one link rigid manipulator: • Slave robot: one link manipulator with two flexible modes (hard to control), shoulder joint of the Shuttle Remote Manipulator System:
Weighting Functions • design technique tries to make the tf from fh to vm-vs like: • Choose ωn and ζ such that desired transient response is achieved for :
Master Compliance Test Using a Triangular Pulse (DT Hinf Control!!)
Master Compliance Test Using a Triangular Pulse (DT Hinf Control!!)
References • [1] G. M. H. Leung, B. A. Francis and J. Apkarian, "Bilateral controller for teleoperators with time delay via μ-synthesis," Robotics and Automation, IEEE Transactions on, vol. 11, pp. 105-116, 1995; • [2] P. F. Hokayem and M. W. Spong, "Bilateral teleoperation: An historical survey," Automatica, vol. 42, pp. 2035-2057, DEC. 2006; • [3] G. J. Balas, J. C. Doyle, K. Glover, A. Packard, R. Smith, “ mu analysis and synthesis toolbox for use with MATLAB”.