Download
1 / 18
180 likes | 314 Views
develop theory. create simulation. compare with empirical data. test behavior in real world. Principles Underlying the Construction of Brain-Based Devices. Jeff Krichmar The Neurosciences Institute San Diego, California, USA.

E N D
develop theory create simulation compare with empirical data test behavior in real world Principles Underlying the Construction of Brain-Based Devices Jeff Krichmar The Neurosciences Institute San Diego, California, USA
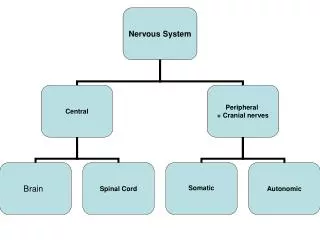
Construction of an Intelligent Machine Following the Brain Based Model • Design should be constrained by these principles: • Active sensing and autonomous movement in the environment. • Organize the signals from the environment into categories without a priori knowledge or instruction. • Incorporate a simulated brain with detailed neural dynamics and neuroanatomy. • Engage in a behavioral task and adaptation of behavior when an important environmental event occurs. • Allow comparisons with experimental data acquired from animal systems.
Active Sensing and Autonomous Movement in the Environment Darwin IV-VI 1992 - 1998 Darwin VII-VIII 1999 - 2002 Darwin IX-X 2003 - present BrainWorks 2004 - present
Organize the Signals from the Environment into Categories without A Priori Knowledge or Instruction Seth et al, Cerebral Cortex, November 2004, V 14 N 11 Fabre-Thorpe, Phil. Trans. R. Soc. Lond. B (2003) 358, 1215–1223
Incorporate A Simulated Brain With Detailed Neural Dynamics And Neuroanatomy
Camera ODOMETRY HD V1 Width V1 Color V2/4 Width V2/4 Color IT Pr ATN MHDG HIPPOCAMPUS BF R+ S R- voltage dependent MOTOR inhibitory IR Platform IR Wall plastic value dependent Incorporate A Simulated Brain With Detailed Neural Dynamics And Neuroanatomy ECinFB DGFB CA1FB CA3FB ECin DG CA3 CA1 Cortex CA1FF CA3FF ECout ECoutFB S MHDG voltage independent
Engage in a Behavioral Task And Adapt Behavior When An Important Environmental Event Occurs
Engage in a Behavioral Task And Adapt Behavior When An Important Environmental Event Occurs
Allow Comparisons with Experimental Data Acquired from Animal Systems
Allow Comparisons with Experimental Data Acquired from Animal Systems CA1 ECout CA3 DG ECin
Incorporate A Simulated Brain With Detailed Neural Dynamics And Neuroanatomy predictive input reflex response = error signal reflex “Preflex”
Incorporate A Simulated Brain With Detailed Neural Dynamics And Neuroanatomy Camera excitatory Motion Area (MT) inhibitory climbing fiber error signal Pre-Cerebellar Nuclei LTD LTD Purkinje Cells Turn Purkinje Cells Velocity Inferior Olive Velocity Inferior Olive Turn Deep Cerebellar Nuclei Turn Deep Cerebellar Nuclei Velocity Error signal Error signal LTP “Preflex” “Preflex” Reflex Reflex IR Turn Motor Turn Motor Velocity IR Velocity
Engage in a Behavioral Task and Adapt Behavior when an Important Environmental Event Occurs Un-Trained Trained
Allow Comparisons with Experimental Data Acquired from Animal Systems LTD • Weight Matrices (initially, all weights were equal) • Pre-Cerebellar-NucleiPurkinje Cells for velocity • White = maximum • Black = minimum • More widespread LTD for sharper courses results in lower velocity Pre-Cerebellar Nuclei LTD Purkinje Cells Velocity
Development of Intelligent Machines that follow Neurobiological and Cognitive Principles in their Construction
Don Hutson Jeff Krichmar Jeff McKinstry Thomas Allen Anil Seth Alisha Lawson Brian Cox Jason Fleischer Botond Szatmary Jim Snook Donatello Darwin X BrainWorks Segway B Darwin V Build A Brain Team
Construction of an Intelligent Machine Following the Brain Based Model • Design should be constrained by these principles: • Active sensing and autonomous movement in the environment. • Organizing the signals from the environment into categories without a priori knowledge or instruction. • Incorporating a simulated brain with detailed neural dynamics and neuroanatomy. • Engaging in a behavioral task and adaptation of behavior when an important environmental event occurs. • Allowing comparisons with experimental data acquired from animal systems.