Download
1 / 10
100 likes | 312 Views
Interrupts and Interrupt Handling. David Ferry, Chris Gill CSE 522S - Advanced Operating Systems Washington University in St. Louis St. Louis, MO 63130. Why Interrupts?. Interrupts allow a currently executing process to be preempted

E N D
Interrupts andInterrupt Handling David Ferry, Chris Gill CSE 522S - Advanced Operating Systems Washington University in St. Louis St. Louis, MO 63130
Why Interrupts? • Interrupts allow a currently executing process to be preempted • Without interrupts, a process could only be removed from the processor when it ended or voluntarily yielded Interrupt use cases: • The timer interrupt controls the scheduling frequency of a system • Peripheral devices use interrupts to request CPU attention • Processors use interrupts to communicate in multi-processor systems (e.g. for load balancing or synchronization) CSE 522S – Advanced Operating Systems
Interrupt Mechanisms On the ARM architecture, there are three physical types of interrupts: • SWI: software interrupts (i.e. exceptions) • IRQ: regular hardware interrupts • FIQ: fast hardware interrupts Linux has three interrupt semantics: • Software interrupts routed via SWI table • Hardware interrupts routed via the IDT • Inter-processor interrupts CSE 522S – Advanced Operating Systems
Software vs Hardware Interrupts Software interrupts we saw before: • User mode initiates system calls with the SWI instruction (or on x86, the INT instruction) • Illegal instructions are trapped • Occurs synchronously with processor instructions Hardware interrupts are from devices: • Indicated by an electrical signal to a processor • On ARM, multiplexed by the Generic Interrupt Controller (GIC) • Asynchronous with instruction stream CSE 522S – Advanced Operating Systems
Hardware Interrupt Interface Register new handlers with request_irq(), three key attributes: • IRQ number • IRQ handler function • Whether the IRQ is shared Handler functions execute in interrupt context: • Disables own interrupt line (optionally all interrupts) • May be interrupted by other interrupts • Does not need to be re-entrant • Cannot sleep CSE 522S – Advanced Operating Systems
Hardware Interrupt Tension Handlers must be fast no matter what task requires: • Can preempt more important work • Disables own interrupt line (bad for shared lines), and may disable all lines • Must perform potentially large amounts of work to service hardware • Cannot sleep/block, so cannot call functions that can sleep/block (such as kmalloc()) Strategy: Service hardware immediately but defer as much work as possible till later. CSE 522S – Advanced Operating Systems
Top Half / Bottom Half Modern interrupt handlers are split into top half (fast) and bottom half (slow) components Top half: • Does minimum work to service hardware • Sets up future execution of bottom half • Clears interrupt line Bottom half: • Performs deferred processing Example: Network card – top half clears card buffer while bottom half processes and routes packets CSE 522S – Advanced Operating Systems
Bottom Half Mechanisms Softirqs (interrupt context) • Statically defined • Most concurrency / performance • Same softirq handler can execute concurrently on different processors Tasklets (interrupt context) • Should be your default choice over softirqs • Tasklet handlers of same type do not execute concurrently Work Queues (process context) • Defers work to generic kernel threads (kworker) • Can sleep • Replaces making your own deferred kernel thread CSE 522S – Advanced Operating Systems
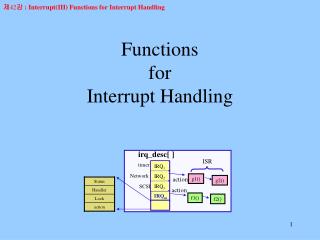
Hardware Interrupt Implementation Sequence of events: • Someone registers a handler on specific IRQ line • Device raises interrupt line with GIC • GIC de-multiplexes and interrupts CPU • CPU jumps to interrupt descriptor table (IRQ table or FIQ table) in entry_armv.S via svn_entry and irq_handle • C code starts at asm_do_irq() • generic_handle_irq() (arch independent inkernel/irq/irqdesc.c) • Proceeds to specific handlers from there • Return after executing all handlers CSE 522S – Advanced Operating Systems
Inter-processor Interrupts (IPIs) Modern multi-core machines need a way for cores to communicate. • Start/stop/sleep/wakeup other cores • Request task migration • Request remote function call (synchronization) Implemented differently from traditional interrupts, see smp_cross_call() inarch/arm/kernel/smp.c CSE 522S – Advanced Operating Systems