Download
1 / 25
250 likes | 530 Views
Ranger Telerobotics Program. Brian Roberts University of Maryland Space Systems Laboratory http://www.ssl.umd.edu/. On-Orbit Servicing Workshop 14 November 2001. Space Systems Laboratory. 25 years of experience in space systems research

E N D
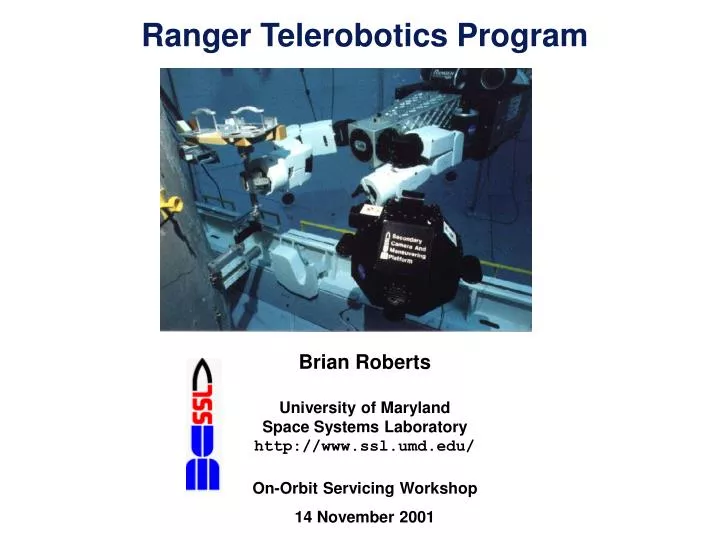
Ranger Telerobotics Program Brian Roberts University of Maryland Space Systems Laboratory http://www.ssl.umd.edu/ On-Orbit Servicing Workshop 14 November 2001
Space Systems Laboratory • 25 years of experience in space systems research • Focus is to develop and test complete systems capable of performing complex space tasks end-to-end • People • 4 full time faculty • 12 research and technical staff • 18 graduate students • 28 undergraduate students • Facilities • Neutral Buoyancy Research Facility (25 ft deep x 50 ft in diameter) • About 150 tests a year • Only neutral buoyancy facility dedicated to basic research and only one in world located on a university campus • Fabrication capabilities include rapid prototype machine, CNC mill and lathe for prototype and flight hardware • Class 100,000 controlled work area for flight integration • Basic tenet is to maximize involvement of students in every level of research activities
SSL Assets for On-Orbit Servicing • Development and testing of multiple complete robotic systems capable of performing complex space tasks end-to-end: • Docking • Assembly • Inspection • Maintenance • Facility for evaluating systems in a simulated 6 degree-of-freedom (DOF) microgravity environment • Expertise: • Autonomous control of multiple robotic systems • Design of dexterous robotic manipulators • Adaptive control techniques for vehicle dynamics • Use of interchangeable end effectors • Investigation of satellite missions benefiting most from robotic servicing
What are the Unknowns in Space Robotics? Flexible Connections to Work Site? Capabilities and Limitations? Human Workload Issues? Multi-arm Control and Operations? Control Station Design? Interaction with Non-robot Compatible Interfaces? ManipulatorDesign? Hazard Detection and Avoidance? Utility of InterchangeableEnd Effectors? Development, Production, and Operating Costs? Ground-based Simulation Technologies? Effects and Mitigation of Time Delays? Ground Control?
Multimode Proximity Operations Device (MPOD) • System to evaluate controls associated with robotic docking • Full 6 DOF mobility base • Full state feedback through an on-board sensor suite, including an acoustic-based sensor system • Probe-drogue docking system • Operational since 1986 • Achievements: • Autonomous approach and docking • Maneuvering and berthing of large masses • Application of nonlinear adaptive neural network control system
Supplemental Camera and Maneuvering Platform • Supplemental Camera and Maneuvering Platform (SCAMP) is a free-flying camera platform • 6 DOF mobility base • Stereo video and close-up color cameras • Originally used to observe neutral buoyancy operations • Evolved to evaluate robotic inspection • Operational since 1992 • Achievements: • Used routinely to observe robotic and non-robotic neutral buoyancy operations • Demonstrated visual survey and inspection
SCAMP Space Simulation Vehicle (SSV) • Continuation of SCAMP’s evolution into a high fidelity neutral buoyancy simulation of 6 DOF space flight dynamics • Uses onboard sensors (3-axis gyros, accelerometers, magnetometers, and a 3-D acoustic positioning system) to accurately calculate its position, attitude, and translational and rotational velocities • Robot is positioned to a specified location, determined by a mathematical computer simulation • Operational since 1997 • Achievements: • Cancellation of water drag effects for flight dynamics • Model-referenced vehicle flight control • Adaptive control of unknown docked payloads • Autonomous docking • Different methods of trajectory planning are being investigated
Beam Assembly Teleoperator (BAT) • Free-flying robotic system to demonstrate assembly of an existing space structure not robot friendly: • 6 DOF mobility base • 5 DOF dexterous assembly manipulator • Two pairs of stereo monochrome video cameras • Non-articulated grappling arm for grasping the structure under assembly • Specialized manipulator for performing the coarse alignment task for the long struts of the truss assembly • Operational since 1984 • Achievements: • Combination of simple 1 DOF arm with dexterous 5 DOF manipulator proved to be a useful approach for assembly of a tetrahedral structure • Demonstrated utility of small dexterous manipulator to augment larger, less dexterous manipulator • Assisted in the change out of spacecraft batteries of Hubble Space Telescope
“Ranger” Class Servicers • Ranger Telerobotic Flight eXperiment (RTFX) • Free-flight satellite servicer designed in 1993; neutral buoyancy vehicle operational since 1995 • Robotic prototype testbed for satellite inspection, maintenance, refueling, and orbit adjustment • Demonstrated robotic tasks in neutral buoyancy • Robotic compatible ORU replacement • Complete end-to-end connect and disconnect of electrical connector • Adaptive control for free-flight operation and station keeping • Two-arm coordinated motion • Coordinated multi-location control • Night operations • With potential Shuttle launch opportunity, RTFX evolved into Ranger Telerobotic Shuttle eXperiment in 1996
Ranger Telerobotic Shuttle eXperiment (RTSX) • Demonstration of dexterous robotic on-orbit satellite servicing • Robot attached to a Spacelab pallet within the cargo bay of the orbiter • Task ranging from simple calibration to complex dexterous operations not originally intended for robotic servicing • Uses interchangeable end effectors designed for different tasks • Controlled from orbiter and from the ground • A joint project between NASA’s Office of Space Science (Code S) and the University of Maryland Space Systems Laboratory • Key team members • UMD - project management, robot, task elements, ground control station • Payload Systems, Inc. - safety, payload integration, flight control station • Veridian - system engineering and integration, environmental testing • NASA/JSC - environmental testing
Ranger’s Place in Space Robotics How the Operator Interacts with the Robot How the Robot Interacts with the Worksite
Robot Characteristics • Body • Internal: main computers and power distribution • External: end effector storage and anchor for launch restraints • Head = 12 cube • Four manipulators • Two dexterous manipulators (5.5 in diameter; 48 long) • 8 DOF (R-P-R-P-R-P-Y-R) • 30 lb of force and 30 ft-lbf of torque at end point • Video manipulator (55 long) • 7 DOF (R-P-R-P-R-P-R) • Stereo video camera at distal end • Positioning leg (75 long) • 6 DOF (R-P-R-P-R-P) • 25 lb of force and 200 ft-lbf of torque; can withstand 250 lbf at full extension while braked ~1500 lbs weight; 14 length from base on SLP to outstretched arm tip
Task Suite • Fiduciary tasks • Static force compliance task (spring plate) • Dynamic force-compliant control over complex trajectory (contour task) • High-precision endpoint control (peg-in-hole task) • Robotic ORU task • Remote Power Controller Module insertion/removal • Robotic assistance of EVA • Articulating Portable Foot Restraint setup/tear down • Non-robotic ORU task • HST Electronics Control Unit insertion/removal
End Effectors Microconical End Effector Bare Bolt Drive Right Angle Drive Tether Loop Gripper EVA Handrail Gripper SPAR Gripper
Operating Modalities Video Displays (3) • Flight Control Station (FCS) • Single console • Selectable time delay • No time delay • Induced time delay • Ground Control Station • Multiple consoles • Communication time delay for all operations • Multiple user interfaces • FCS equivalent interface • Advanced control station interfaces (3-axis joysticks, 3-D position trackers, mechanical mini-masters, and force balls) Keyboard, Monitor, Graphics Display 2x3 DOF Hand Controllers CPU (Silicon Graphics O2)
Ranger Neutral Buoyancy Vehicles • Neutral Buoyancy Vehicle I (RNBV I) • Free-flight prototype vehicle operational since 1995 • Used to simulate RTSX tasks and provide preliminary data until RNBVII becomes operational • RNBV II is a fully-functional, powered engineering test unit for the RTSX flight robot. It is used for: • Refining hardware • Modifying control algorithms and developing advanced scripts • Verifying boundary management and computer control of hazards • Correlating space and neutral buoyancy operations • Supporting development, verification, operational, and scientific objectives of the RTSX mission • Flight crew training • An articulated non-powered mock-up is used for hardware refinement and contingency EVA training
Graphical Simulation Task Simulation GUI Development Worksite Analysis
Simulation Correlation Strategy EVA/EVR Correlation All On-Orbit Operations Performed Pre/Post Flight with RTSX Neutral Buoyancy Vehicle for Flight/NB Simulation Correlation Simulation Correlation Simulation Correlation EVA/EVR Correlation
Arm Evolution Roboticus Dexterus Roboticus Videus Roboticus Grapplus BAT Dexterous Arm (5 DOF) BAT Tilt & Pan Unit (2 DOF) BAT Grapple Arm (0 DOF) ca. 1984 ca. 1984 ca. 1984 Ranger Dexterous Arm Mark 1 (7 DOF) Ranger Grapple Arm (7 DOF) ca. 1994 ca. 1996 Ranger Dexterous Arm Mark 2 (8 DOF) Ranger Video Arm (7 DOF) Ranger Positioning Leg (6 DOF) ca. 1996 ca. 1996 ca. 1998
Program Status • 1995: RNBV I operations began at the NBRF • 1996: Ranger TSX development began • June 1999: Ranger TSX critical design review • December 1999: Space Shuttle Program Phase 2 Payload Safety Review • April 2000: Mock-up began operation (62 hours of underwater test time on 45 separate dives to date) • October 2001: Prototype positioning leg pitch joint and Mark 2 dexterous arm wrist began testing • Today: RNBV II is being integrated; 75% of the flight robot is procured • January 2002: RNBV II operations planned to begin • Ranger TSX is #1 cargo bay payload for NASA’s Office of Space Science and #2 on Space Shuttle Program’s cargo bay priority list
SSL Assets for On-Orbit Servicing • Development and testing of multiple complete robotic systems capable of performing complex space tasks end-to-end: • Docking: MPOD and Ranger TFX • Assembly: BAT and Ranger • Inspection: SCAMP • Maintenance: Ranger • Facility for evaluating systems in a simulated 6 DOF microgravity environment • Expertise: • Autonomous control of multiple robotic systems • Design of dexterous robotic manipulators • Adaptive control techniques for vehicle dynamics • Use of interchangeable end effectors • Investigation of satellite missions benefiting most from robotic servicing
Computer Control of Hazards • Human response is inadequate to respond to the robot’s speed, complex motions, and multiple degrees of freedom • Onboard boundary management algorithms keep robot from exceeding safe operational envelope regardless of commanded input
Results of a Successful Ranger TSX Mission Demonstration of DexterousRobotic Capabilities Understanding of Human Factorsof Complex Telerobot Control Pathfinder for FlightTesting of Advanced Robotics Precursor for Low-CostFree-Flying Servicing Vehicles Lead-in to CooperativeEVA/Robotic Work Sites Dexterous Robotics forAdvanced Space Science