Download
1 / 17
180 likes | 446 Views
Advisor: Dr. Onur Bilgen (MAE) Mechanical Subgroup Members : Gordon Clark Megan Guzman Paul Jelenek Can Karaoz Electrical Subgroup Members: Jared Gongloff Brett Lefebvre. Brad Ketterer Mark Levenstein Daniel Park Stephanie Vasquez. Michael Pollard Theodore Teates.

E N D
Advisor: Dr. Onur Bilgen (MAE) Mechanical Subgroup Members: • Gordon Clark • Megan Guzman • Paul Jelenek • Can Karaoz • Electrical Subgroup Members: • Jared Gongloff • Brett Lefebvre • Brad Ketterer • Mark Levenstein • Daniel Park • Stephanie Vasquez • Michael Pollard • Theodore Teates Solid-State Smart Material Based Prosthetic Arm SOLID STATE PROSTHETIC SENIOR DESIGN TEAM 2013-2014
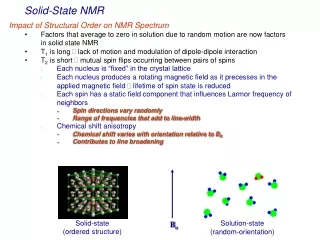
Background • Approximately 6,000 upper extremity amputations per year in the U.S. • 30% to 50% of upper limb prosthetic users avoid wearing their prosthetic due to its weight [1]. • Many current prosthetics are still based on designs from the 1950s [2] • Highly functional prosthetics range anywhere from $3,000 - $30,000, making them unaffordable for many amputees [3]. • . . . a modern solution is needed. References: [1] Price et al., Smart Mater. Struct. 16,1401 (2007) [2] Cupoet al., J. Rehabil. Res. Dev. 35, 431 (1998) [3] Turner, Disabled World, 2009, <http://www.disabled-world.com/assistivedevices/prostheses/prosthetics-costs.php>. SOLID STATE PROSTHETIC SENIOR DESIGN TEAM 2013-2014
Objectives Our goal is to develop a lightweight, composite upper limb prosthesis that utilizes Shape Memory Alloy (SMA) wires for high force-to-weight actuation. • Prototype for trans-humeral amputees • Muscle-like fluid movement • 2 DOF (degrees-of-freedom) • No motors, linkages, gears, etc. SOLID STATE PROSTHETIC SENIOR DESIGN TEAM 2013-2014
Organization 1 2 3 4 5 SOLID STATE PROSTHETIC SENIOR DESIGN TEAM 2013-2014
Bicep Triceps Elbow Plate Inner Elbow/ SMA Wire Intersection SMA Wire Bundle Outer Elbow/ SMA Wire Intersection Forearm Wrist SOLID STATE PROSTHETIC SENIOR DESIGN TEAM 2013-2014
(1) Finite-Element-Analysis Model Location of Constraints 15 lb Force • Elbow Joint • Modulus of Elasticity: 198 ksi • Poisson’s Ratio: 0.1 • Density: 0.0578 lb/in^3 Max Displacement SOLID STATE PROSTHETIC SENIOR DESIGN TEAM 2013-2014
(2) Composites Clamp Material Load Ruler Clamp SOLID STATE PROSTHETIC SENIOR DESIGN TEAM 2013-2014
(2) Mold 3-D printed Male Mold Upper Arm Recessed Elbow Forearm SOLID STATE PROSTHETIC SENIOR DESIGN TEAM 2013-2014
(3) Single SMA wire testing Retrieved Data To LabView Load Cell – Computer Connection Power Supply SOLID STATE PROSTHETIC SENIOR DESIGN TEAM 2013-2014 Fixed Voltage (10V) Variable Voltage
(3) SMA Artificial Muscles Shoulder Screw End Caps End Cap SMA/Silicone Muscle Weld Nut
(3) SMA Ribbon Fabrication Posts Loop configuration for equal pre-tension SMA wire wound from loops to posts Liquid Silicon SOLID STATE PROSTHETIC SENIOR DESIGN TEAM 2013-2014
(3) Wire Framing Rig Ribbon prototype (0.0015 inch SMA wire) Old Frame Space for end-caps New Frame (longer & slimmer)
(4) Actuation and Sensing 4 Strain Gage circuit connection (350 OHM SG) 6 MOSFET Conditioning Circuit SOLID STATE PROSTHETIC SENIOR DESIGN TEAM 2013-2014
(5) Controls • Arduino Mega 2560 • Open/Closed loop manual (button) control • Optimal progression towards EMG control Taken from Peerdemanet al.,J. Rehabil. Res. Dev. 48, 719 (2011) DOI:10.1682/JRRD.2010.08.0161 SOLID STATE PROSTHETIC SENIOR DESIGN TEAM 2013-2014
(5) Controls • Neural Network • Gradient Descent Algorithm Desired Trajectory creator NN controller Plant http://www.hindawi.com/journals/cin/2011/289398/fig1/ Solid state prosthetic senior design team 2013-2014
Gantt chart SOLID STATE PROSTHETIC SENIOR DESIGN TEAM 2013-2014
Thank You For Your time Questions or Comments? SOLID STATE PROSTHETIC SENIOR DESIGN TEAM 2013-2014