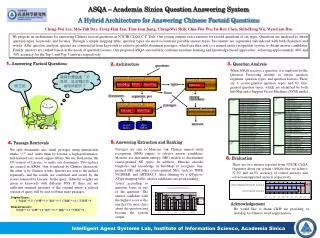
Download
1 / 29
290 likes | 307 Views
Learn about Active Disturbance Rejection Control (ADRC) for dealing with uncertainties in systems, including feedback stabilization, extended state observer (ESO), and adaptive control methods. Explore the observability of uncertain systems and the application to an uncertain beam equation.

E N D
Active Disturbance Rejection Control to Uncertain Euler-Bernoulli Beam Equation Bao-Zhu Guo A new type of active disturbance rejection control Academy of Mathematics and Systems Science Academia Sinica July 1, 2018 BIT
1. ADRC ADRC: Active disturbance rejection control A control design method To copy with uncertainty in system Estimation + cancellation strategy Most of robust controls are in “worst case concern” Compare: July 1, 2018 BIT
Han’s whole picture TD is the first step toward ADRC (Guo,Zhao:2011) ? Extended state observer (ESO) (Guo,Zhao:2011) Active disturbance rejection control (ADRC) (Guo,Zhao:2013) July 1, 2018 BIT
1. Active disturbance rejection control (ADRC) • Consider feedback stabilization of first order system: Unknown “total disturbance” Time variance, nonlinearity, external disturbance, etc. Idea: using (output) to estimate ! Exact observable Possibility: July 1, 2018 BIT
1. ADRC (cont’d) • Extended state observer (ESO): using output to estimate disturbance Injection output Let needs to be bounded Pole assignment for linear part: high gain choice July 1, 2018 BIT
Adaptive control: Example Consider Unknown parameter Expect: Parameter identification Control Closed-loop Lyapunov Parameter update law PE condition LaSale principle: July 1, 2018 BIT
Why IMP works? Observable Output Let Exosystem: dynamics Not stabilizable System is observable! July 1, 2018 BIT
Why IMP works? Observer design Observer: Set Not necessary Theorem Control: July 1, 2018 BIT
J.V.Poncelet: measure disturbance July 1, 2018 BIT
G.Shipanov: invariance principle July 1, 2018 BIT
Han’s seminal idea (ESO): 1963-66 Moscow Jingqing Han (1937-2008) July 1, 2018 BIT
2. Observability: Infinite-dimensional system • For deterministic linear infinite-dimensional systems (and hence for all ) (i) Well-posed for output such that (ii) Observability inequality is continuous For uncertain systems, it should be coincident to this when uncertainty is zero July 1, 2018 BIT
2. Observability: uncertain system • for uncertain linear type infinite dimensional systems System is said to be observable if 1). When uncertainty is zero, system is exactly observable 2). The output can identify the uncertainty But what does it mean by this? Very recently, we gave an identification of uncertainty: uncertainty Of course you can use July 1, 2018 BIT
2. Observability: uncertain system (cont’d) Can we recover the state continuously from the output ? No This system is always observable So we cannot recover the state from the output continuously Note not in the same space In conclusion: uncertainty can only be “recognized’’ by output ! July 1, 2018 BIT
3. Problem: uncertain beam equation • Uncertain beam equation Total disturbance Exponentially stable (i). (ii). Under some condition We didn’t do this For observer, we do not need which is for feedback! July 1, 2018 BIT
3. Uncertain beam equation: observability Exponentially stable Conservative One is not enough System is exact observable with July 1, 2018 BIT
4. State observer: Step 1: separation disturbance Step 1: Construct an auxiliary system which brings the total disturbance into an exponentially stable system: Output Input Let Total disturbance Then Linear part is exponentially stable Independent of control July 1, 2018 BIT
4. State observer: Step 2: Disturbance estimator Step 2: Design an disturbance estimator (unknown input observer for ) output Let Interesting fact Then Error is independent of uncertainty This is an exponentially stable system July 1, 2018 BIT
4: One unknown input observer • Putting together, we obtain a first unknown input observer output where It is not very convenient for control design July 1, 2018 BIT
4. State observer: Step 3: observer Step 3: Compensate the total disturbance by its estimate to obtain estimator based observer The observer is designed as Output Uncertainty compensation Original July 1, 2018 BIT
4: State observer: Unknown input observer Another unknown input observer: putting everything together Output No is used No high gain, No derivative of disturbance is required Input July 1, 2018 BIT
5. Observer based feedback: disturbance free Note:State feedback for observer is output feedback for original Observer: Observer is linear is used here Cancel the disturbance by feedback July 1, 2018 BIT
5. Closed-loop system Closed-loop system: Total disturbance Output stabilizing feedback Closed-loop is still nonlinear! July 1, 2018 BIT
5. Nonlinear problem: linear method Make an invertible transformation: appeared previously Then the closed-loop is equivalent to Linear part and nonlinear part in next page July 1, 2018 BIT
5. Nonlinear problem: linear method (cont’d) Nonlinear part: Interesting fact II Nonlinear inhomogeneous But determined by linear The “cascade” structure avoids the nonlinear difficulty! Nonlinear problem can be treated by linear method July 1, 2018 BIT
5. Convergence of closed-loop Theorem: Subsystems bounded Convergence Internal stable July 1, 2018 BIT
6. Conclusions Active disturbance rejection control to PDE with internal uncertainty and external disturbance ● ● Estimation/cancelation strategy No high gain is used (perhaps infinite gain due to PDE?) ● No derivative boundedness of disturbance is assumed ● ● Applicable to multi-dimensional PDEs July 1, 2018 BIT
New book on ADRC July 1, 2018 BIT
---The end--- Thank You ! July 1, 2018 BIT