Download
1 / 11
120 likes | 224 Views
Growing Self-Reconstruction Maps. Presenter : Jiang-Shan Wang Authors : Renata Lucia Mendonca Ernesto do Rego, Aluizio Fausto Ribeiro Araujo, Fernando Buarque de Lima Neto. 國立雲林科技大學 National Yunlin University of Science and Technology. TNN 2010. Outline. Motivation Objective

E N D
Growing Self-Reconstruction Maps Presenter : Jiang-Shan Wang Authors : Renata Lucia Mendonca Ernesto do Rego, Aluizio Fausto Ribeiro Araujo, Fernando Buarque de Lima Neto 國立雲林科技大學 National Yunlin University of Science and Technology TNN 2010
Outline • Motivation • Objective • Methodology • Experiments • Conclusion • Comments
Motivation • Surface reconstruction from a point cloud is a research area which has attracted increasing interest due to recent developments in 3-D scanning technology. • The wide use of mainframes and personal computers to visualize and process large 3-D models.
Objective Point Cloud Proposing a new method for surface reconstruction based on growing self-organizing maps(SOMs), called growing self-reconstruction maps(GSRMs).
Methods - Overview Extended competitive Hebbian learning. Edges and incident Faces Removal. Vertex Insertion. Topological Learning.
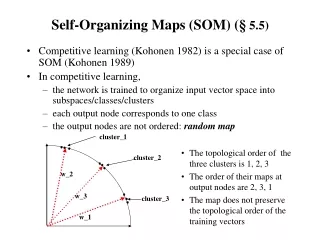
Methods - Extended competitive Hebbian learning ξ is a sample. Two winner nodes(S1,S2).
Methods - Edges and incident Faces Removal The age of an edge is higher than threshold. If vertex does not have any edge emanating from it, remove this vertex.
Conclusion • The main advantages of the proposed method: • The meshes with resolution are generated that meet different application requirements. • The meshes produced with GSRM represent satisfactorily the target object shape. • the mesh produced is a two-manifold, which is a requirement of almost all applications that manipulate meshes.
Comments • Advantage • It is interesting topic. • Drawback • It is not easy to understanding. • Application • 3-D modeling.