Download
1 / 7
80 likes | 115 Views
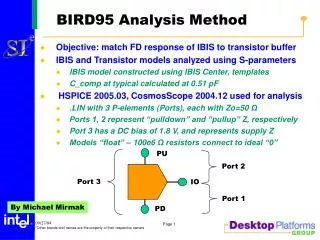
A method to analyze chattering with high-frequency occurrences, where relay gain adapts to unmodeled dynamics, based on state and equivalent control dependencies. Parameters include oscillation frequency and system states. The method ensures sliding mode existence and stability.

E N D
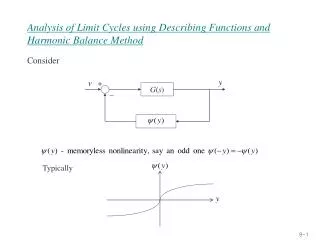
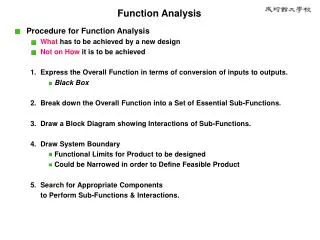
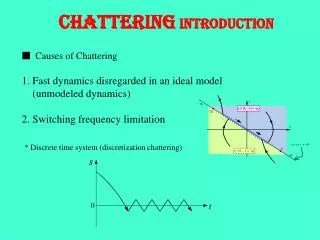
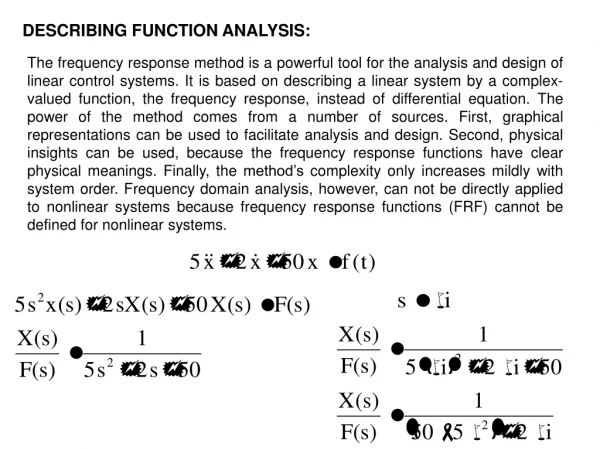
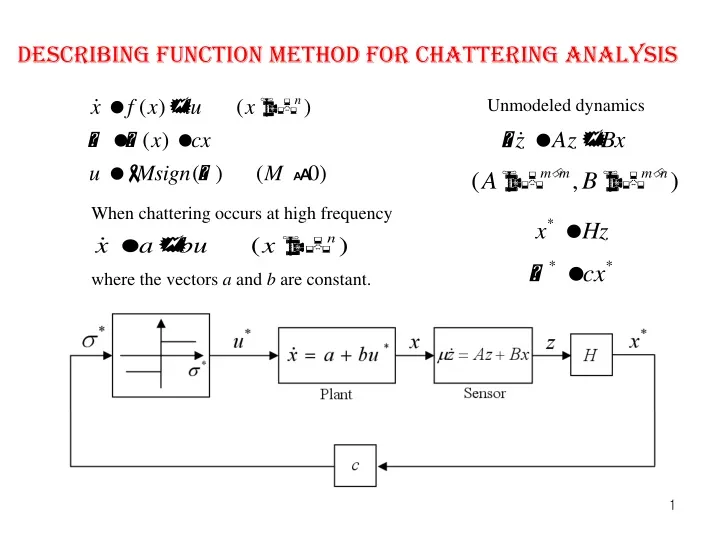
Describing Function Method for Chattering Analysis Unmodeled dynamics When chattering occurs at high frequency where the vectors a and b are constant.
Parameters of Oscillations = Equivalent Control * Frequency (k = 0, 1, 2, … )
Relay Gain Adaptation State-dependent Gain Method Relay gain depends on system states Unmodeled Dynamics
Relay Gain Adaptation State-dependent Gain Method Unmodeled Dynamics
R Relay Gain Adaptation Equivalent-control-dependent Gain Method Relay gain depends on the equivalent control
Relay Gain Adaptation Equivalent-control-dependent Gain Method (i) Gf >0 -1 < η< 1 (M0≥ |g|) → Sliding mode exists (ii) Gf <0
Relay Gain Adaptation Equivalent-control-dependent Gain Method