Download
1 / 38
• 430 likes • 852 Views
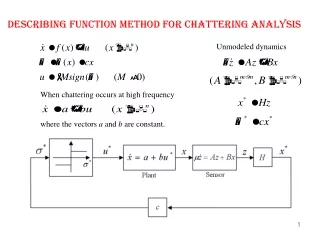
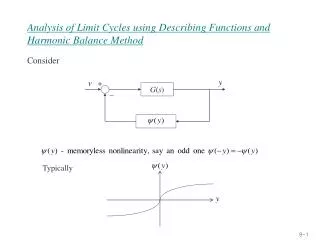
+. G ( s ). _. Analysis of Limit Cycles using Describing Functions and Harmonic Balance Method. Consider. Typically. Motivation and the structure of the approach. Given this system – first we would like to study its stability using the circle, Popov, and small gain theorems.

E N D
+ G(s) _ Analysis of Limit Cycles using Describing Functions and Harmonic Balance Method Consider Typically
Motivation and the structure of the approach Given this system – first we would like to study its stability using the circle, Popov, and small gain theorems. Assume that none of the methods show the stability of the origin. Thus it may be unstable. The next thing to look for – oscillation or limit cycles. In general, we can apply the Poincare-Bendixson or the index theory – but this is only for the planar system. The harmonic balance method allows one to study the limit cycle in the feedback system shown above for any nonlinearity.
Motivation Assume now that Filter hypothesis
N.B : Motivation
Given Problem Formulation & Main Result As it has been pointed out before, the approach to the solution of the problem is as follows :
+ G(s) _ Solution
Solution (Continued) Since we can write and
Solution (Continued) Still it is an infinite dimensional equation. To make it finite dim., we use the filter hypothesis : Then, we have • qth order harmonic balance could be solves numerically (by computer) Assume q =1. Then we have
real complex (two real no.) real Solution (Continued) Use one more notation
(1) Solution (Continued) Therefore the first equation is satisfied for all G(0). The second equation can be written as follows : and
(2) Solution (Continued) Introduce the describing function Then equation (1) can be written as If (2) has a solution a, w, then the original system “probably” has a periodic solution close to asinwt, if (2) does not have a solution, then the original system probably has no periodic solution. Main result : Reference : • Justification of the describing function methodSIAM. J. of Control (vol. 9, no. 4, Nov. 1971, p 568-589)
Alternate Method The problem could also be approached analytically So find w’s where G(jw) intersects with real axis. Then find a from the first Equation for each point of intersection.
1 -1 1 2 Example 1 1 -1
Example 2 (Continued) no oscillation no oscillation oscillation oscillation
-1 saturation nonlinearity 1 Example 2 (Continued)
There exists a nonlinearity which gives oscillation Example 3 & 4 Rayleigh equation
|G(j)| 1 Example 4 (Continued)
Example : Non-Odd Feedback • The case of non-odd feedback
Im Re Example (Continued)
Example: Hysteresis Ex: Hysteresis
Example (Continued) Im Re a increasing
Stability Rules • Stability rules Im increasing a increasing Re
Stability Rules (Continued) stable unstable
Harmonic Balance Method • Justification of the Harmonic Balance Method
higher order harmonics Solution
Evaluation 1 Im 1/G critical circle Re 1/G error circle
1 -1 1 -1 Example Ex: +