Download
1 / 39
390 likes | 495 Views
9.11. FLUX OBSERVERS FOR DIRECT VECTOR CONTROL WITH MOTION SENSORS.

E N D
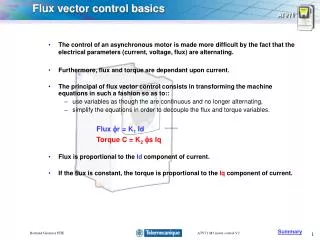
9.11. FLUX OBSERVERS FOR DIRECT VECTOR CONTROL WITH MOTION SENSORS The motor stator or airgap flux space phasor amplitude lma and its instantaneous position - qer+ga* - with respect to stator phase a axis have to be computed on line, based on measured motor voltages, currents and, when available, rotor speed. The torque may be calculated from flux and current space phasors and thus once the flux is computed and stator currents measured, the torque problem is solved. 9.11.1. Open loop flux observers Open loop flux observers are based on the voltage model or on the current model. Voltage model makes use of stator voltage equation in stator coordinates (from (9.32) with w1 = 0): (9.95) Electric Drives
From (9.37) with a = Lm / Lr: (9.96) Both stator flux, , and rotor flux, , space phasors, may thus, in principle, be calculated based on and measured. The corresponding signal flow diagram is shown in figure 9.29. Figure 9.29. Voltage - model open loop flux observer (stator coordinates) Electric Drives
On the other hand the current model for the rotor flux space phasor is based on rotor equation in rotor coordinates (wb = wr): (9.97) Two coordinate transformations - one for current and other for rotor flux - are required to produce results in stator coordinates. This time the observer works even at zero frequency but is very sensitive to the detuning of parameters Lm and tr due to temperature and magnetic saturation variation. Besides, it requires a rotor speed or position sensor. Parameter adaptation is a solution. The corresponding signal flow diagram is shown in figure 9.30. Electric Drives
Figure 9.30. Current control open loop flux observer More profitable, however, it seems to use closed loop flux observers. 9.11.2. Closed loop flux observers Figure 9.31. Close loop voltage and current model rotor flux observer Electric Drives
Many other flux observers have been proposed. Among them, the third flux (voltage) harmonic estimator [21] and Gopinath observer [22], model reference adaptive and Kalman filter observers. They all require notable on line computation effort and knowledge of induction motor parameters. Consequently they seem more appropiate when used together with speed observers for sensorless induction motor drives as shown in the corresponding paragraph, to follow after the next case study. Electric Drives
9.12. INDIRECT VECTOR SYNCHRONOUS CURRENT CONTROL WITH SPEED SENSOR - A CASE STUDY The simulation results of a vector control system with induction motor based on d.c. current control - are now given. The simulation of this drive is implemented in MATLAB - SIMULINK. The motor model was integrated in two blocks, the first represents the current and flux calculation module in d - q axis (figure 9.32), the second represents the torque,speed and position computing module (figure 9.33). The motor used for this simulation has the following parameters: Pn = 1100W, Vnf = 220V, 2p = 4, rs = 9.53W, rr = 5.619W, Lsc = 0.136H, Lr = 0.505H, Lm = 0.447H, J = 0.0026kgfm2. Electric Drives
Figure 9.32. The indirect vector current control system Electric Drives
Figure 9.33. The motor space phasor (d, q) model Electric Drives
The following figures represent the speed, torque, current and flux responses, for the starting process and with load torque applied at 0.4s. The value of load torque is 4Nm. Figure 9.34. Speed transient response Electric Drives
Figure 9.35. Torque response Electric Drives
Figure 9.36. Phase current waveform Electric Drives
Figure 9.37. Stator flux amplitude Electric Drives
Figure 9.38. Rotor flux amplitude Electric Drives
9.13. FLUX AND SPEED OBSERVERS IN SENSORLESS DRIVES • Sensorless drives are becoming predominant when only up to 100 to 1 speed control range is required even in fast torque response applications (1-5ms for step rated torque response). • 9.13.1. Performance criteria • To assess the performance of various flux and speed observers for sensorless drives the following performance criteria have become widely accepted: • steady state error; • torque response quickness; • low speed behaviour (speed range); • sensitivity to noise and motor parameter detuning; • complexity versus performance. Electric Drives
9.13.2. A classification of speed observers • The basic principles used for speed estimation (observation) may be classified as: • A. Speed estimators • B. Model reference adaptive systems • C. Luenberger speed observers • D. Kalman filters • E. Rotor slot ripple • With the exception of rotor slot ripple all the other methods imply the presence of flux observers to calculate the motor speed. Electric Drives
9.13.3. Speed estimators Speed estimators are in general based on the classical definition of rotor speed : (9.98) where w1 is the rotor flux vector instantaneous speed and (Sw1) is the rotor flux slip speed. w1 may be calculated in stator coordinates based on the formula: (9.99) or (9.100) Electric Drives
are to be determined from a flux observer (see figure 9.32, for example). On the other hand the slip frequency (Sw1), (9.23), is: (9.101) Notice that is strongly dependent only on rotor resistance rr as Lm / Lr is rather independent of magnetic saturation. Still rotor resistance is to be corrected if good precision at low speed is required. This slip frequency value is valid both for steady state and transients and thus is estimated quickly to allow fast torque response. Such speed estimators may work even at 20rpm although dynamic capacity of torque disturbance rejection at low speeds is limited. This seems to be a problem with most speed observers. Electric Drives
9.13.4. Model reference adaptive systems (MRAS) MRASs are based on comparision of two estimators. One of them does not include speed and is called the reference model. The other, which contains speed, is the adjustable model. The error between the two is used to derive an adaption model that produces the estimated speed for the adjustable model. To eliminate the stator resistance influence, the airgap reactive power qm [25] is the output of both models: (9.102) (9.103) The rotor flux magnetization current equation in stator coordinates is ((9.15) with w1 = 0): (9.104) Electric Drives
Now the speed adaptation mechanism is: (9.105) The signal flow diagram of the MRAS obtained is shown in figure 9.39. Figure 9.39. MRAS speed estimator based on airgap reactive power error Electric Drives
The effect of the rotor time constant tr variation persists and influences the speed estimation. However if the speed estimator is used in conjunction with indirect vector current control at least rotor field orientation is maintained as the same (wrong!) tr enters also the slip frequency calculator. The MRAS speed estimator does not contain integrals and thus works even at zero stator frequency (d.c. braking) (figure 9.40.a) and does not depend on stator resistance rs. It works even at 20rpm (figure 9.40.b) [25]. Figure 9.40. a.) Zero frequency b.) low speed operation of MRAS speed estimator Electric Drives
9.13.5. Luenberger speed observers First the stator current and the rotor flux are calculated through a full order Luenberger observer based on stator and rotor equations in stator coordinates: (9.106) with (9.107) The full order Luenberger observer writes: (9.110) The matrix G is chosen such that the observer is stable. (9.111) Electric Drives
The speed estimator is based on rotor flux and estimators: (9.113) In essence the speed estimator is based on some kind of torque error. If the rotor resistance rr has to be estimated an additional high reference current ida* is added to the reference flux current ids*. Then the rotor resistance may be estimated [26] as: (9.114) Remarkable results have been obtained this way with minimum speed down to 30rpm. The idea of an additional high frequency (10 times rated frequency) flux current may be used to determine both the rotor speed and rotor time constant tr [27]. Extended Kalman filters for speed and flux observers [28] also claim speed estimation at 20 - 25rpm though they require considerable on line computation time. Electric Drives
9.13.6. Rotor slots ripple speed estimators The rotor slots ripple speed estimators are based on the fact that the rotor slotting openings cause stator voltage and current harmonics ws1,2 related to rotor speed , the number of rotor slot Nr and synchronous speed : (9.115) Band pass filters centered on the rotor slot harmonics are used to separate and thus calculate from (9.115). Various other methods have been proposed to obtain and improve the transient performance. The response tends to be rather slow and thus the method, though immune to machine parameters, is mostly favorable for wide speed range but for low dynamics (medium - high powers) applications [27]. For more details on sensorless control refer to [30]. Electric Drives
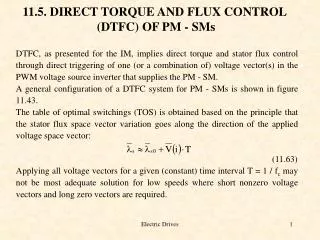
9.14. DIRECT TORQUE AND FLUX CONTROL (DTFC) DTFC is a commercial abbreviation for the so called direct self control proposed initially [32 - 33] for induction motors fed from PWM voltage source inverters and later generalized as torque vector control (TVC) in [4] for all a.c. motor drives with voltage or current source inverters. In fact, based on the stator flux vector amplitude and torque errors sign and relative value and the position of the stator flux vector in one of the 6 (12) sectors of a period, a certain voltage vector (or a combination of voltage vectors) is directly applied to the inverter with a certain average timing. To sense the stator flux space phasor and torque errors we need to estimate the respective variables. So all types of flux (torque) estimators or speed observers good for direct vector control are also good for DTFC. The basic configurations for direct vector control and DTFC are shown on figure 9.41. Electric Drives
Figure 9.41. a.) Direct vector current control b.) DTFC control As seen from figure 9.41 DTFC is a kind of direct vector d.c. (synchronous) current control. Electric Drives
9.14.1. DTFC principle Though figure 9.41 uncovers the principle of DTFC, finding how the T.O.S. is generated is the way to a succesful operation. Selection of the appropiate voltage vector in the inverter is based on stator equation in stator coordinates: (9.117) By integration: (9.118) In essence the torque error eT may be cancelled by stator flux acceleration or deceleration. To reduce the flux errors, the flux trajectories will be driven along appropriate voltage vectors (9.118) that increase or decrease the flux amplitude. Electric Drives
Figure 9.42. a.) Stator flux space phasor trajectory b.) Selecting the adequate voltage vector in the first sector (-300 to +300) Electric Drives
The complete table of optimal switching, TOS, is shown in table 9.2. Table 9.2. Basic voltage vector selection for DTFC As expected the torque response is quick (as in vector control) but it is also rotor resistance independent above 1 - 2Hz (figure 9.43) [2]. Figure 9.43. TVC torque response Electric Drives
9.15. DTFC SENSORLESS: A CASE STUDY The simulation results of a direct torque and flux control drive system for induction motors are presented. The example was implemented in MATLAB - SIMULINK. The motor model was integrated in two blocks, first represents the current and flux calculation module in d - q axis, the second represents the torque, speed and position computing module (figure 9.44). Figure 9.44.The DTFC system Electric Drives
Figure 9.45. The I.M. model The motor used for this simulation has the following parameters: Pn = 1100W, Unf = 220V, 2p = 4, rs = 9.53W, rr = 5.619W, Lsc = 0.136H, Lr = 0.505H, Lm = 0.447H, J = 0.0026kgfm2. Electric Drives
Figure 9.46. Speed and torque estimators Electric Drives
Figure 9.47. Speed transient response (measured and estimated) Electric Drives
Figure 9.48. Phase current waveform (steady state) Electric Drives
Figure 9.49. Torque response (measured and estimated) Electric Drives
Figure 9.50. Stator flux amplitude Electric Drives
Figure 9.51. Rotor flux amplitude Electric Drives