Download

1 / 32
320 likes | 415 Views
Paths, Smoothing, Least Squares Fit. CS 551/651 Spring 2002. Following a Path. How do we compute an object’s first-person view as it follows a path? Situate a local coordinate system about the object and orient the system Positive z-axis points frontward Frontward is first derivative, P’(s)

E N D
Paths, Smoothing, Least Squares Fit CS 551/651 Spring 2002
Following a Path • How do we compute an object’s first-person view as it follows a path? • Situate a local coordinate system about the object and orient the system • Positive z-axis points frontward • Frontward is first derivative, P’(s) • Positive y-axis points upward • Upward is cross product of z-axis and P’’(s) • Positive x-axis points left • Cross product of z- and y-axes
Newton-Raphson • No guarantees that it will find the roots of an equation • Or that it will be efficient Caught Here
Cross Product Right Hand Rule • See: http://www.phy.syr.edu/courses/video/RightHandRule/index2.html • Orient your right hand such that your palm is at the beginning of A and your fingers point in the direction of A • Twist your hand about the A-axissuch that B extends perpendicularly from your palm • As you curl your fingers to make a fist, your thumb will point in the direction of the cross product
Frenet Frame • The local coordinate system • If curve has no curvature, technique fails • Use Frenet Frame from before straight section starts (and interpolate rotation about z-axis if necessary) • Use dot product of y-axis before and after straight section to determine interpolation amount
Frenet Frame • Discontinuity in the curvature causes jump in local coordinate system • Can be jumpy if curve is not very smooth • Doesn’t reflect desirable camera effects like banking into a corner • A curve that moves downward in 3-space will cause Frenet frame to orient upside-down
Alternative Orientation Methods • Define a natural notion of ‘UP’, y-axis • The opposite direction of gravity • Define a focal point, z-axis • z-axis = focal_point – cur_pos • x-axis = z-axis x UP • y-axis = z-axis x x-axis • Passing close to focal point causes extreme changes • How do you automatically update focal point?
Lookahead • If cur_pos = p(s), the focal point = p(s+ds) • Note, should be arc length parameterization to prevent wandering camera • What about the end of curve (where s+ds is undefined)? • Extrapolate curve in the direction of its tangent
Smoothing Data • Frequently we use a series of points to represent paths • We turn points into piecewise Bezier curve • But may be overkill • Alternatives
Smoothing Data • Average a point with its neighbors • But this causes flattening of curves • Fit cubic curve to subsets of points • Curve is inherently smooth • Sample curve at midpoint for new point
Cubic Curves • P(u) = au3 + bu2 + cu + d • For a point, Pi, build curve from its four neighbors • Pi-2, Pi-1, Pi+1, Pi+2 • Evaluate the cubic at its midpoint (u = ½) • Average cubic midpoint and Pi
Evaluating the Cubic • Pi-2 = P(0) = d • Pi-1 = P(1/4) = a 1/64 + b 1/16 + c1/4 + d • Pi+1 = P(3/4) = a 27/64 + b 9/16 + c¾ + d • Pi+2 = P(1) = a + b + c + d • 4 equations and 4 unknowns… solve
Evaluating Cubic • What about endpoints? • Pi+1 and Pi+2 don’t exist • P’0 = P3 + 3 (P1 – P2) • Second in from beginning or end? • Build a quadratic (parabola) • P(u) = au2 + bu + c • Solve for a, b, and c using P0, P2, P3 • P1 is averaged with P(1/3)
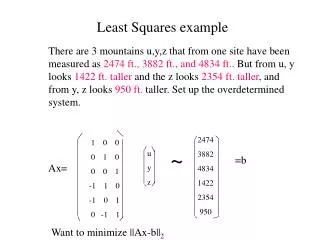
Overconstrained Cubics • Earlier, we solved for cubic coefficients using Gaussian Elimination / Linear Programming • We solved for x such that Ax = b • A was square and invertable
Overconstrained Cubics • What if we had 10 points and we wished to fit a line, quadratic, or cubic to them? • Ax = b • Matrix dimensions: • [10 x 4] * [4 x 1] = [10 x 1] • Cannot trivially invert A
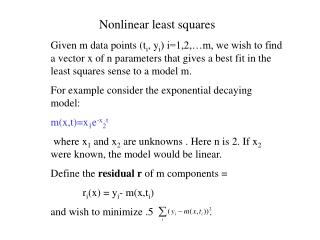
Least Squares Fit • Select a cubic curve (the x-vector in our example) that minimizes the standard deviation of the distances between the points and the cubic curve:
Least Squares Fit • E is the error function: • f(u) is a function of (a, b, c, d) and u • It is the parametric cubic curve • We want to minimize E • Wherever E is minimized:
Least Squares Fit • Compute the partial derivative of E w.r.t. a, b, c, and d • Set each partial derivative equal to 0 • We now have four equations and four unknowns • Solve… • This method is slow and there are better least squares solution methods
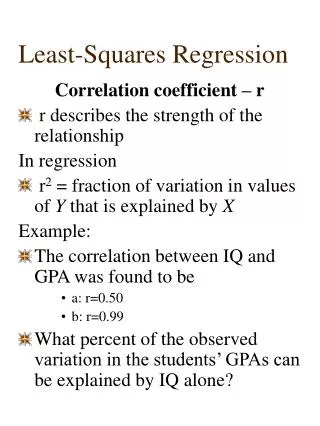
Linear Least Squares • We just talked about linear least squares • The cubic equation is nonlinear because x is raised to powers greater than 1 • ax3 + bx2 + cx + d • But fitting a cubic to a set of data is linear curve fitting • Parameters (a, b, c, d) enter into the formula as simple multipliers of terms that are added together
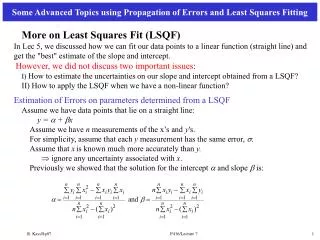
An example • Fit a line to data: • The vertical deviation of the ith piece of data (xi, yi) is: • di = yi – y = yi – (mxi + b) • Where m and b are the unknown parameters • By minimizing square of deviations • d2i = (yi – y)2 = (yi – (mxi + b))2
An example • Minimize sum of di and set partials to 0 b= m=
Computer Tools • Write your own function • Mathematica • Fit [data, {1, x}, x] • Excel • Linest (y-array, x-array, count, statistics) • See http://www.orst.edu/instruct/ch490/lessons/lesson9.htmfor more info
Robustness of Least Squares • Effective, complete, and appropriate for many problems in science/engineering • Estimates of unknowns are optimal • Efficient use of data • Not good for extrapolation past endpoints • Sensitive to presence of outliers • Model validation is useful
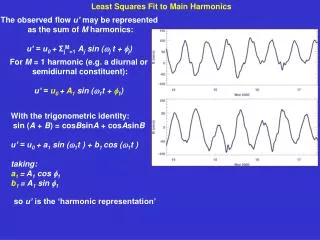
Convolution Kernels • Another smoothing technique • Imagine data define stepwise function • Create the kernel • Centered around zero • Symmetric • Has finite support • Area under curve equals 1 Box Gaussian Tent
New value for P1 is: Convolution Kernels • Compute new (averaged) points by convolving kernel with data • Slide kernel over all points • Watch for overlap at beginning and end
Determining a Path on Surface • Consider a polygonal terrain map • Assume you have the (x,y,z) coordinates of two endpoints • What are the values of intermediate points on the line?
Path Determination • Construct a plane that passes through the two points and is (roughly) perpendicular to the ground plane • How do we compute the perpendicular? • How doe we compute the plane? • Intersect plane with the terrain polys • How?
Path Determination • If the terrain is modeled as a parametric surface: f(u, v) = z • Linearly interpolate between (u1, v1) and (u2, v2) and solve for f(uinterp, vinterp)
Path Determination • What if ground is constructed from many triangles and we wish to only walk along the edges? • Start from the first point • And then what? • Consider all coincident edges • Project each edge to straight line on path. How? • Dot product (remember to normalize)
Path Determination • Edge with smallest angle is selected • Keep applying until destination is reached • Guaranteed to reach destination?
Downhill Paths • To go downhill • Cross product of surface normal and ‘up’ gives you a surface tangent vector (perpendicular to down) • Cross product of surface tangent and normal vector defines downhill vector
Reminder • Read papers and write questions for Tuesday • Assignment due Thursday at 9:00 a.m. • Warping and morphing are next