Download
1 / 33
370 likes | 855 Views
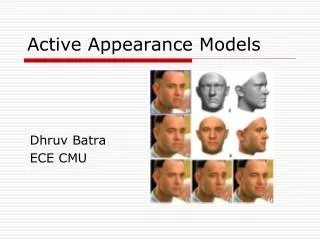
Active Appearance Models. based on the article: T.F.Cootes, G.J. Edwards and C.J.Taylor. "Active Appearance Models" , 1998. . presented by Denis Simakov. Mission. Image interpretation by synthesis Model that yields photo-realistic objects

E N D
Active Appearance Models based on the article: T.F.Cootes, G.J. Edwards and C.J.Taylor. "Active Appearance Models", 1998. presented by Denis Simakov
Mission • Image interpretation by synthesis • Model that yields photo-realistic objects • Rapid, accurate and robust algorithm for interpretation • Optimization using standard methods is too slow for realistic 50-100 parameter models • Variety of applications • Face, human body, medical images, test animals
Appearance • Appearance = Shape + Texture • Shape: tuple of characteristic locations in the image, up to allowed transformation • Example: contours of the face up to 2D similarity transformation (translation, rotation, scaling) • Texture: intensity (or color) patch of an image in the shape-normalized frame, up to scale and offset of values
Shape • Configuration of landmarks • Good landmarks – points, consistentlylocated in every image. Add also intermediate points • Represent by vector of the coordinates:e.g. x=(x1,...,xn, y1,...,yn)T for n 2D landmarks • Configurations x and x' are considered to have the same shape* if they can be merged by an appropriate transformation T (registration) • Shape distance – the distance after registration: * Theoretical approach to shape analysis: Ian Dryden (University of Nottingham)
warped to becomes Shape-free texture • An attempt to eliminate texture variation due to different shape (“orthogonalization”) • Given shape x and a target “normal” shape x' (typically the average one) we warp our image so that points of x move into the corresponding points of x'
Modeling Appearance training set (annotated grayscale images) shape (tuple of locations) texture (shape-free) PCA PCA model of shape model of texture PCA model of appearance
* Training set • Annotated images • Done manually, it is the most human time consuming anderror prone part of building the models • (Semi-) automatic methods are being developed** * Example from: Active Shape Model Toolkit (for MATLAB), Visual Automation Ltd. ** A number of references is given in: T.F.Cootes and C.J.Taylor. “Statistical Models of Appearance for Computer Vision”, Feb 28 2001; pp. 62-65
Training sets for shape and texture models • From the initial training set (annotated images) we obtain {x1,...,xn} – set of shapes, {g1,...,gn} – set of shape-free textures. • We allow the following transformations: • S for the shape: translation (tx,ty), rotation , scaling s. • T for the texture: scaling , offset (Tg = (g – 1)/). • Align both sets using these transformations, by minimizing distance between shapes (textures) and their mean • Iterative procedure: align all xi (gi) to the current ( ), recalculate ( ) with new xi (gi), repeat until convergence.
Examples of training sets Shapes Textures * The mean shape * From the work of Mikkel B. Stegmann, Section for Image Analysis, The Technical University of Denmark
Example: 3 modes of a shape model Model of Shape • Training set {x1,...,xn} of aligned shapes • Apply PCA to the training set • Model of shape: where (the mean shape) and Ps (matrix of eigenvectors) define the model; bs is a vector of parameters of the model. • Range of variation of parameters: determined by the eigenvalues, e.g.
Example: 1st mode of a texture model: Model of Texture • Training set {g1,...,gn} of shape-free normalized image patches • Apply PCA • Model of texture: • Range of variation of parameters
Combining two models • Joint parameter vectorwhere the diagonal matrix Wsaccounts for different units of shape and texture parameters. • Training set • For every pair (xi,gi) we obtain: • Apply PCA to the training set {b1,...,bn} • Model for parameters: b = Pcc, Pc = [Pcs|Pcg]T • Finally, the combined model: where Qs = PsWs-1Pcs, Qs = PgPcg.
Tim Cootes His shape A mode of the model • Color model (by Gareth Edwards) Several modes Examples (combined model) • Self-portrait of the inventor
Generating synthetic images: example By varying parameters c in the appearance model we obtain synthetic images:
Given: • an appearance model, • a new image, • a starting approximation Find: the best matching synthetic image Active Appearance Model (AAM) • Difference vector: dI = Ii – Im • Ii – input (new) image; • Im – model-generated (synthetic) image for the current estimation of parameters. • Search for the best match • Minimize D = |dI|2, varying parameters of the model Approach:
Predicting difference of parameters • Knowing the matching error dI, we want to obtain information how to improve parameters c • Approximate this relation by dc = AdI • Precompute A: • Include into dc extra parameters: translations, rotations and scaling of shape; scaling and offset of gray levels (texture) • Take dI in the shape-normalized framei.e. dI = dg where textures are warped into the same shape • Generate pairs (dc,dg) and estimate A by linear regression.
Translation along one axis In the multi-resolution model (L0 – full resolution, L1 and L2 – succesive levels of the Gaussian pyramid) Checking the quality of linear prediction We can check our linear prediction dc = Adg by perturbing the model
AAM Search Algorithm Iterate the following: For the current estimate of parameters c0 • Evaluate the error vector dg0 • Predict displacement of the parameters: dc = Adg0 • Try new value c1 = c0 – kdc for k=1 • Compute a new error vector dg1 • If |dg1|<|dg0| then accept c1 as a new estimate • If c1 was not accepted, try k=1.5; 0.5; 0.25, etc. until |dg| is no more improved. Then we declare convergence.
Model of face Model of hand From the work of Mikkel B. Stegmann, Section for Image Analysis, The Technical University of Denmark AAM search: examples
Extension of AAM By Jörgen Ahlberg, Linköping University AAM: tracking experiments AAM Done with AAM-API (Mikkel B. Stegmann)
AAM: measuring performance • Model, trained on 88 hand labeled images (about 200 pixels wide), was tested on other 100 images. Convergence rate Proportion of correct convergences
View-Based Active Appearance Models based on the article: T.F. Cootes, K.N. Walker and C.J.Taylor, "View-Based Active Appearance Models", 2000. presented by Denis Simakov
View-Based Active Appearance Models Basic idea: to account for global variation using several more local models. For example: to model 180 horizontal head rotation exploiting models, responsible for small angle ranges
±(40- 60) -40- +40 ±(60- 110) View-Based Active Appearance Models • One AAM (Active Appearance Model) succeeds to describe variations, as long as there no occlusions • It appears that to deal with 180 head rotation only 5 models suffice (2 for profile views, 2 for half-profiles, 1 for the front view) • Assuming symmetry, we need to build only 3 distinct models
Estimation of head orientation where is the viewing angle, c – parameters of the AAM; c0, cc and cs are determined from the training set • Assumed relation: • For the shape parameters this relation is theoretically justified; for the appearance parameters its adequacy follows from experiments • Determining pose of a model instance • Given c we calculate the view angle : where is the pseudo-inverse of the matrix [cc|cs]T
Tracking through wide angles Given several models of appearance, covering together a wide angle range, we can track faces through these angles • Match the first frame to one of the models (choose the best). • Taking the model instance from the previous frame as the first approximation, run AAM search algorithm to refine this estimation. • Estimate head orientation (the angle). Decide if it’s time to switch to another model. • In case of a model change, estimate new parameters from the old one, and refine by the AAM search. To track a face in a video sequence:
Tracking through wide angles: an experiment • 15 previously unseen sequences of known people (20-30 frames each). • Algorithm could manage 3 frames per second (PIII 450MHz)
Predicting new views • Given a single view of a face, we want to rotate it to any other position. • Within the scope of one model, a simple approach succeeds: • Find the best match c of the view to the model. Determine orientation . • Calculate “angle-free” component: cres = c – (c0+cccos()+cssin()) • To reconstruct view at a new angle , use parameter:c() = c0+cccos()+cssin() + cres
Predicting new views: wide angles • To move from one model to another, we have to learn the relationship between their parameters • Let ci,j be the “angle-free” component (cres) of the i’th person in the j’th model (an average one). Applying PCA for every model, we obtain: ci,j = cj+Pjbi,jwhere cj is the mean of ci,j over all people i. • Estimate relationship between bi,j for different models j and k by linear regression:bi,j = rj,k+Rj,kbi,k • Now we can reconstruct a new view: ...
Predicting new views: wide angles (cont.) • Now, given a view in model 1, we reconstruct view in model 2 as follows: • Remove orientation: ci,1 = c – (c0+cccos()+cssin()) • Project into the space of principle components of the model 1: bi,1 = P1T(ci,1 – c1). • Move to the model 2: bi,2 = r2,1+R2,1bi,1. • Find the “angle-free” component in the model 2:ci,2 = c2+P2bi,2. • Add orientation: c() = c0+cccos()+cssin() + ci,2.
Predicting new views: example • Training set includes images of 14 people. • A profile view of unseen person was used to predict half-profile and front views.