Download
1 / 41
410 likes | 439 Views
This paper explores sample-by-sample adaptation of discrete-time models and controllers through gradient descent weight updates, ensuring stability and convergence in control loops. The approach introduces stability conditions for nonlinear models and controllers, suitable for Higher-Order Neural Units. Demonstrations include NOx prediction and lung motion forecasting.

E N D
PROSPECTS OF GRADIENT METHODS FOR NONLINEAR CONTROL Ivo BUKOVSKÝ1 Jiří BÍLA1 Noriasu HOMMA2 Ricardo RODRIGUEZ1 1Czech Technical University in Prague 2Tohoku University, Japan
PROSPECTS OF GRADIENT METHODS FOR NONLINEAR CONTROL • We consider sample-by-sample adaptation of discrete-time models and controllers by gradient descent weight update system
PROSPECTS OF GRADIENT METHODS FOR NONLINEAR CONTROL • Stability monitoring and maintenance of weight update system of adaptively tuned models and controllers significantly contributes to a stable and convergent control loop
PROSPECTS OF GRADIENT METHODS FOR NONLINEAR CONTROL • In the paper, we introduce derivation of stability condition for gradient-descent tuned models and controllers • The approach is valid for models and controllers that are nonlinear (incl. linear), but they are linear in parameters • Not suitable for conventional neural networks (MLP, RBF) • Suitable for Higher-Order Neural Units (HONU, also known as polynomial neural networks) (not limited to)
PROSPECTS OF GRADIENT METHODS FOR NONLINEAR CONTROL Further in this presentation • Fundamental gradient descent schemes for adaptive identification and control • Static or dynamic Higher Order Neural Units (HONU) • Stability conditions for static and dynamic HONUand its maintenance at every adaptation step • Demonstration of achievements with ONU( NOx prediction – EME I, lung motion prediction, nonlinear control loop of a laboratory system)
+ - Fundamental gradient descent schemes for adaptive identification and controlPlant Identification by Gradient Descent Plant weight update system • Adaptive model • linear • neural network,
+ - (Základní schemata adaptivní identifikace a řízení gradientovými metodami)Automatické ladění adaptivního stavového regulátoru Referenční model (požadované chování regulované soustavy) Žádaný průběh chování Žádaná hodnota Regulovanásoustava - + • Adaptivní regulátor • lineární • polynomiální • - klasická neuronová síť Systém adaptovaných vah
- - + + Fundamental gradient descent schemes for adaptive identification and control (continue)Tuning of Adaptive Controller in a Feedback Control Loop with Gradient Descent Model of desired behavior adaptive controller - linear PID - neural network, Plant
+ - - + Fundamental gradient descent schemes for adaptive identification and control (continue)Updating Control Inputs Directly by Gradient Descent Plant • Adaptive model • linear • neural network, eC(k)
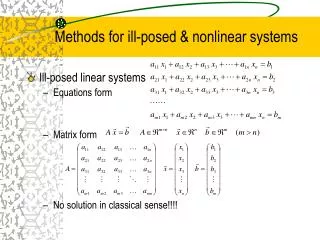
The question is: • How do we assure stability of nonlinear adaptive control loop? • The ways is to assure stability and convergence of adaptive components in a control loop (plant model + controller) • What nonlinear model to use?
Static & Dynamic Higher-Order Neural Units How do we assure stability of the nonlinear adaptive control loop? What model to choose? • MLP or RBF networks as models and controllers • Not linear in parameters • Guaranteeing stability is complicated (not suitable for undergraduate level, difficult for PhD students from non-heavy-math schools) • Guaranteeing stability is complicated and theoretically heavy for practicioners (thus not attractive for practice)
Static & Dynamic Higher-Order Neural Units How do we assure stability of the nonlinear adaptive control loop? What model to choose? Example of 2nd-order HONU: Weight-update system:
Static & Dynamic Higher-Order Neural Units (continue) Sketch of optimization error surfaces Linear x MLP Networks x HONU convetional NN LNU Approximation strength of neural networks can be improved by adding more neurons or even layers, GA, PSO,… HONU 0 “axis of adapted neural weights”
Static & Dynamic Higher-Order Neural Units (continue)Static MLP vs. QNU as MISO models ofhot steam turbine averaged data (“steady states”, batch training by Levenberg-Marquardt) • double hidden layer FFNN • single hidden layer FFNN • static QNU • measured data
Static&Dynamic Higher-Order Neural Units (continue) Respiration time series: Training Accuracy for Predicting Exhalation Time -Instances of trained neural architectures trained from different initial conditions by L-M algorithm 2-hidden-layer static MLPs (static feedforward networks) 1-hidden-layer static MLPs (static feedforward networks) static QNUs
Trénování predikce nelineárního periodického signálu Trénování predikce polohy plic Static & Dynamic Higher-Order Neural Units (continue) Trénování predikce Mackey-Glass
Stability of weight-update system • Condition for STATIC HONU • Condition for DYNAMICAL HONU HONU ,
Lung Tumor Motion Prediction by static QNU sampling 15 Hz, epochs=100, Ntrain=360, 492 neural weights
Nonlinear Control Loop of a Laboratory System [ ] Ladislav Smetana: Nonlinear Neuro-Controller for Automatic Control,Laboratory System, Master’s Thesis, Czech Tech. Univ. in Prague, 2008.
Nonlinear Control Loop of a Laboratory System PID Control and Nonlinearity of the Plant Tunned PID controller for 10 cm Tunned PID controller for 20 cm 30
Nonlinear Control Loop of a Laboratory System Linear PID QNU as Adaptive Controller (simplest gradient descent) 31
False Neighbor Analysis is a single-scale analysis To train neural networks , input (state) vector must be estimated to minimize uncertainty in training data
False Neighbor Analysis is a single-scale analysis x input data y output data y=f(x) False Neighbors
MULTI-SCALE ANALYSISapproach(MSA) number of false neighbours on a main diagonal 150 100 FN 50 0 1 2 3 4 5 6 id...index of a diagonal cell • What is the fundamental idea? • To characterize a system over the range of setups • Power law
MULTI-SCALE ANALYSISapproach(MSA) • To characterize a system over the range of intervals • What is the fundamental idea? • The power-law concept r(k)=2,4,8 q … quantity H … characterizing exponent r(k) … discretely growing radius
MULTI-SCALE ANALYSISapproach(MSA) • To characterize a system over the range of intervals • What is the fundamental idea? • The power-law concept r(k)=2,4,8 q … quantity H … characterizing exponent r(k) … discretely growing radius
MULTI-SCALE ANALYSISapproach(MSA) • What is the fundamental idea?
MULTI-SCALE ANALYSISapproach(MSA) (cont.) • How can MSA help to create better neural network models? False Neighbors Matrix: Multiscale False Neighbor Approach
MULTI-SCALE ANALYSISapproach(MSA) (cont.) • What are other potentrials for MSA for signal processing? • MSA based signal processing • Variance Fractal Dimension Trajectory (VFDT) • Mutual Information • Multiscale approach to calculate mutual information itself • Mutual information of VFDT processed signals • Everywhere, where a common analysis is subject to a single-parameter setup and changing the setup disqualifies the analysis results.