Download
1 / 39
390 likes | 527 Views
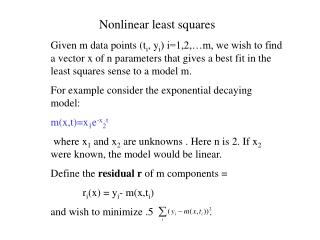
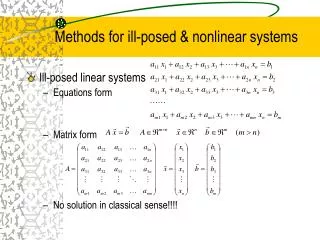
Methods For Nonlinear Least-Square Problems . Jinxiang Chai. Applications. Inverse kinematics Physically-based animation Data-driven motion synthesis Many other problems in graphics, vision, machine learning, robotics, etc. Where , i=1,…,m are given functions, and m>=n .

E N D
Methods For Nonlinear Least-Square Problems Jinxiang Chai
Applications • Inverse kinematics • Physically-based animation • Data-driven motion synthesis • Many other problems in graphics, vision, machine learning, robotics, etc.
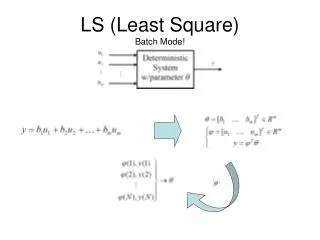
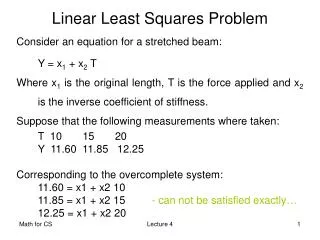
Where , i=1,…,m are given functions, and m>=n Problem Definition Most optimization problem can be formulated as a nonlinear least squares problem
Base Inverse Kinematics Find the joint angles θ that minimizes the distance between the character position and user specified position θ2 θ2 l2 l1 θ1 C=(c1,c2) (0,0)
Global Minimum vs. Local Minimum • Finding the global minimum for nonlinear functions is very hard • Finding the local minimum is much easier
Assumptions • The cost function F is differentiable and so smooth that the following Taylor expansion is valid,
Gradient Descent Objective function: Which direction is optimal?
Gradient Descent Which direction is optimal?
Gradient Descent A first-order optimization algorithm. To find a local minimum of a function using gradient descent, one takes steps proportional to the negative of the gradient of the function at the current point.
Gradient Descent • Initialize k=0, choose x0 • While k<kmax
Newton’s Method • Quadratic approximation • What’s the minimum solution of the quadratic approximation
Newton’s Method • High dimensional case: • What’s the optimal direction?
Newton’s Method • Initialize k=0, choose x0 • While k<kmax
Newton’s Method • Finding the inverse of the Hessian matrix is often expensive • Approximation methods are often used - conjugate gradient method - quasi-newton method
Comparison • Newton’s method vs. Gradient descent
Gauss-Newton Methods • Often used to solve non-linear least squares problems. Define We have
Gauss-Newton Method • In general, we want to minimize a sum of squared function values
Gauss-Newton Method • In general, we want to minimize a sum of squared function values • Unlike Newton’s method, second derivatives are not required.
Gauss-Newton Method • In general, we want to minimize a sum of squared function values
Gauss-Newton Method • In general, we want to minimize a sum of squared function values Quadratic function
Gauss-Newton Method • In general, we want to minimize a sum of squared function values Quadratic function
Gauss-Newton Method • In general, we want to minimize a sum of squared function values Quadratic function
Gauss-Newton Method • In general, we want to minimize a sum of squared function values Quadratic function
Gauss-Newton Method • Initialize k=0, choose x0 • While k<kmax
Gauss-Newton Method • In general, we want to minimize a sum of squared function values Any Problem? Quadratic function
Gauss-Newton Method • In general, we want to minimize a sum of squared function values Any Problem? Quadratic function
Gauss-Newton Method • In general, we want to minimize a sum of squared function values Any Problem? Quadratic function Solution might not be unique!
Gauss-Newton Method • In general, we want to minimize a sum of squared function values Any Problem? Quadratic function Add regularization term!
Levenberg-Marquardt Method • In general, we want to minimize a sum of squared function values Any Problem?
Levenberg-Marquardt Method • In general, we want to minimize a sum of squared function values Any Problem? Quadratic function Add regularization term!
Levenberg-Marquardt Method • In general, we want to minimize a sum of squared function values Any Problem? Quadratic function Add regularization term!
Levenberg-Marquardt Method • Initialize k=0, choose x0 • While k<kmax
Stopping Criteria • Criterion 1: reach the number of iteration specified by the user K>kmax
Stopping Criteria • Criterion 1: reach the number of iteration specified by the user • Criterion 2: when the current function value is smaller than a user-specified threshold K>kmax F(xk)<σuser
Stopping Criteria • Criterion 1: reach the number of iteration specified by the user • Criterion 2: when the current function value is smaller than a user-specified threshold • Criterion 3: when the change of function value is smaller than a user specified threshold K>kmax F(xk)<σuser ||F(xk)-F(xk-1)||<εuser
Levmar Library • Implementation of the Levenberg-Marquardt algorithm • http://www.ics.forth.gr/~lourakis/levmar/
Constrained Nonlinear Optimization • Finding the minimum value while satisfying some constraints