Download
1 / 12
120 likes | 340 Views
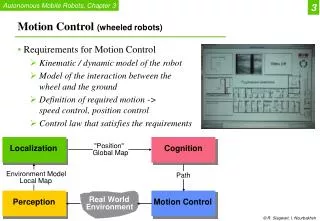
Motion Control. Two-Link Planar Robot. Determine Kp and Kv and Tv. Two-Link Planar Robot. Independent Joint Control. Assuming that the actuator is a rotary dc motor. Position and Velocity Feedback. Position and Velocity Feedback.

E N D
Two-Link Planar Robot Determine Kp and Kv and Tv
Independent Joint Control • Assuming that the actuator is a rotary dc motor
Position and Velocity Feedback • Choose the zero of the controller to cancel the real pole by setting
Position and Velocity Feedback • The closed loop transfer function
Decentralized Forward Compensation • Why is this pole-zero cancellation scheme feasible? • Reduce tracking error but have no effect on disturbance rejection due to the open loop nature • Depend on exact matching of controller and compensation parameters with process param. etc.
Decentralized Forward Compensation • Block scheme of decentralized forward compensation
Operational Space Control • Difficult to measure operation space variables • Considerable computational requirements • Necessary for controlling interaction between manipulator and environment (no exact reference input)