Download
1 / 27
270 likes | 409 Views
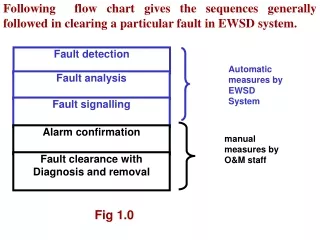
Distributed Online Simultaneous Fault Detection for Multiple Sensors. Ram Rajagopal , Xuanlong Nguyen, Sinem Ergen, Pravin Varaiya EECS, University of California, Berkeley. Plan. Introduction Problem Statement Proposed Solution Analysis and Implementation Experiments Conclusions.

E N D
Distributed Online Simultaneous Fault Detection for Multiple Sensors Ram Rajagopal, Xuanlong Nguyen, Sinem Ergen, Pravin Varaiya EECS, University of California, Berkeley
Plan • Introduction • Problem Statement • Proposed Solution • Analysis and Implementation • Experiments • Conclusions
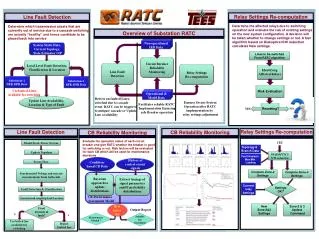
Application: Freeway Traffic Management Cellular Traffic Control ACCIDENT! Traffic Management Center Internet PeMS http://pems.eecs.berkeley.edu Measurement Backhaul Processing Control & Info
Sensor System State largeoscillations
Mean days before failure or working continuously (D4) • 55% of loops work continuously for fewer than 20 days; none works for more than 50 days in 2004 vs. 20% in 2005.
Motivation: freeway monitoring sensors • One sensor per lane every 2 miles • Measures flow, occupancy every 30 seconds • Sensor failures are frequent • Non-stationary environment • Events: onset of traffic jam, accidents, sudden slowdowns
Problem statement • Detect faulty sensors that report plausible values • Distinguish events from faults • Events temporary sudden changes in measurements • Faults lasting sudden changes in measurements • Real time detection • Each sensor uses only local data
Proposed approach • Score S is correlation with block length T samples Sensor Network Fault Graph Change Point Model • Change times have some known priors
Model details • Change times have priors • Scores have joint change distributions • Link information strength
Preview of results • Accounting for average time scale of physical events • Combining multiple sources of weak evidence • Importance of feedback for detection algorithms • Statistical modeling = feasible implementations
Does it make sense? • Empirical distributions from highway deployment Working Faulty
Does it make sense? • Empirical distributions from highway deployment • Use Box-Cox transformation or conditional normal distribution (Kwon, Rice and Bickel, 03)
Selection of block length T • Distinguish events from faults : • Rule: T > Average event duration • Tradeoff: T = minimum waiting time to detect
Measuring the performance • Control false alarm: time (n) • Minimize Average Detection Delay (ADD): time (n)
Single change point review • For minimize ADD • Single change point optimal rule [Shyrayev (1978)]: • At time n test: • Performance [Tartakovsky and Veeravali (2005)]: • Minimum delay achievable for all procedures with false alarm
Model for analytic problems • Two sensors: • X and Y represent aggregates of many links to working sensors • Among all procedures with false alarm , minimum delay? • For each proposed procedure: • Achieved false alarm • Delay
Delay performance lower bound • Theorem 1: For all procedures with false alarm for each sensor:
Multiple sensor posterior rule (no feedback) • Direct extension of single change rule: Y X Z 1 2 • Theorem 2: Common link does not help
Multiple sensor rule (with one bit feedback) Y X Z 1 2 • Use shared link until either sensor thinks it has failed
What is procedure doing? Y X Z 1 2 • Over time, implicit averaging • Over sensors, 1 bit summarizes other links information
False alarm bound • Confusion probabilities • Theorem 3 [Rajagopal et al, 2008]:
Confusion probability • Theorem 4 [Rajagopal et al, 2008]: • For example (using some simplifications): and and Guarantee that
Delay guarantee • Theorem 5 [Rajagopal et al, 2008]:
Delay estimates • Symmetric (X and Y same distribution) method is optimal: • Fully connected i.i.d network:
Two sensor network: confusion probability • Theory predicts covariance ratio > 2
Fully connected network: fixed false alarm Small False Alarm (theory is close!) = 0.1 = 0.0001
Conclusions and future work • Change point framework is good for building algorithms for fault detection • Currently Caltrans collecting data by visiting sensors predicted broken • Developed tools for analysis of multiple change point problems • Simultaneous online multiple event detection