Download
1 / 19
200 likes | 322 Views
ATF Control System and Interface to sub-systems. Nobuhiro Terunuma, KEK 21/Nov/2007. Controlled Devices. ATF already has a lot of devices… 504 Magnets, 12 Klystrons, 162 BPMs, 21 CTs, 40 Screens… CAMAC More than 90% of devices are controlled by CAMAC on Serial highway and on CC/NET

E N D
ATF Control System and Interface to sub-systems Nobuhiro Terunuma, KEK 21/Nov/2007
Controlled Devices • ATF already has a lot of devices… 504 Magnets, 12 Klystrons, 162 BPMs, 21 CTs, 40 Screens… • CAMAC • More than 90% of devices are controlled by CAMAC on Serial highway and on CC/NET • PLCs • LINAC Modulators • Injector Magnets • Temperature monitors • These devices are distributed whole ATF area.
Timing system • Distributed clocks and beam injection signals through the optical fibers. • Synchronized to AC 50Hz • Clocks • 2.1 MHz • 357 MHz • TD2/4 modules on CAMAC for beam injection signal • Pre-triggers (max. 1ms for Laser)
History • 1996~ • Vsystem • CAMAC Serial Highways • Running on VMS 6.2 • Present~ • Vsystem & EPICS • CAMAC Serial Highway and Ethernet Devices • Running on VMS 7.2, LINUX,…
Programming Languages • C • Fortran • Java • C++ (ROOT) • MATLAB • Mathematica (SAD)
Process Control Applications • Vsystem • ATF core system based on the database system • VMS and Linux license for ATF • EPICS • Eco-tech modules for DR-BPM upgrade • ATF2 HAPS for magnets (next year) • others… • ATF developed • TCP/IP socket connection for PLC etc. • Planning to switch into EPICS
Vsystem • Vsystem, from Vista Control Systems, Inc. • It is comprehensive, networked process control software. www.vista-control.com • Automatic signaling to other processes that refer the target data channels. • Data Logging by timer or event. Magnets, Modulators, Temperatures… • Drawing tools for Control windows.
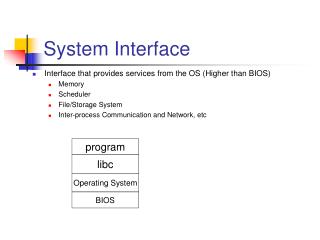
Programming with V-system • Call Vsystem APIs. • FORTRAN or C • Database access can execute the user written programs. • HTML Vsystem manuals Login required because of License
Computers • VMS • present core system because of history • moving to LINUX • for performance, maintenance • LINUX • CAMAC control driver • LTSP (Linux Terminal Server Project) for operator terminals • Video Analysis • Windows • used to setup the commercial products • Mac • Office works
Other Networked Devices • CC/NET • PLC • RS232C-Ethernet converter • Video Cameras
KEK Network SAD Network ATF computers (VMS/Linux) SAD computers (UNIX) Optics Control • Present ATF uses SAD for beam tuning. MAD is not used except for SLAC's local analysis. • ATF uses SAD which is running on the KEKB network. Data are transferred by file and executed by remote commands. • Import SAD into ATF system are not completed because of the localized script files. We should import it for faster beam tuning. • MAD should be installed on ATF for comparative work with SAD, and for "real-time simulator".
ATF Local Network • KEK network • Registration by KEK network division is required for all devices on KEK network. • You can access devices from outside through the VPN connection. • ATF local network • All component of ATF control should be in this local network. • ATF managed network • Quick registration • No direct access from the KEK network (in general). • Connection to the KEK network will be unplugged if we have security problems.
Remote Participation • Capability of remote control from outside should be eliminated. • We have experiences using "WebEx" but still have other choices. • Please see the comment on TB meeting • http://atf.kek.jp/collab/ap/meetings/TB-SGC/TB4/remote.ppt
Expectations for Sub-system • Overall • follow the software/hardware interfaces mentioned before if you need our help. • Care the effects on safety caused by sub-system. • R&D phase • Independent on ATF control is suitable. • No access control will be done by ATF system. • Operation phase • It must be integrated into the ATF control system. • Controlled access is applied even for software update.
Questions from SLAC, 21/Nov/2007 • To discuss and establish clear roles and responsibilities in the control system work, and to develop the requirements and the implementation plan. This discussion would help to understand what external help is needed. • 1) To be more specific, we would like to he hear from Terunuma-san, as System Manager and the person responsible for the control system for ATF2 commissioning and operation, • what is the suggested scope of work, the deliverables, and the plan (including who does what) for the control system work ... in particular: • - confirm what new low-level control functions are needed • (movers, BPMs, laserwire, etc); • - what new high-level applications are needed • (steering, dispersion correction, BBA, feedback, IP tuning) -- how this will be implemented?; • - what will be the structure of the control system • (everything in FORTRAN for Vsystem, with model-based applications implemented with SAD?; some low-level stuff in EPICS?; flight simulator? ... ); • - who will write the code, scripts, decks, etc ; • 2) Is outside help (i.e. foreign collaborators) needed; if so, then what specific tasks would be outsourced, and what will be the framework for participation ... specifically: • - how high-level interface to control system handled? • - how the tuning and alignment algorithms and procedures will be implemented and who will be responsible for that? • - how can collaborators contribute to this development (if required)?
Personal View (1/2) • what is the suggested scope of work, the deliverables, and the plan (including who does what) for the control system work ... in particular: • - confirm what new low-level control functions are needed (movers, BPMs, laserwire, etc); We need them for Movers(including final doublet), Cavity-BPMs, Shintake-monitor, Laser wire and HA power supply. It is clear that each sub-group has a responsibility to prepare the low-level functions which can be integrated into the ATF control system. • - what new high-level applications are needed • (steering, dispersion correction, BBA, feedback, IP tuning) -- how this will be implemented?; This should be handled by tuning group led by Kuroda-san. Original cording should be done by them. Additional works to integrate into the ATF control system will be done by ATF contracted people led by Terunuma. • - what will be the structure of the control system • (everything in FORTRAN for Vsystem, with model-based applications implemented with SAD?; some low-level stuff in EPICS?; flight simulator? ... ); - who will write the code, scripts, decks, etc ; Use commonly available languages for coding; C/C++, Fortran,…. SAD and MAD should work by switching. Role of EPICS and Vsystem should be well discussed later but EPICS may work as a sub-system of Vsystem based ATF control.
Personal View (2/2) • Is outside help (i.e. foreign collaborators) needed; if so, then what specific tasks would be outsourced, and what will be the framework for participation ... specifically: • - how high-level interface to control system handled? This is a similar question before. Original cording which shows the algorithm should be done by beam tuning group. Then we use Vsystem for GUI and user-program interface. This cording is easy by C or Fortran etc. Beam tuning group should decide. • - how the tuning and alignment algorithms and procedures will be implemented and who will be responsible for that? Beam tuning group should decide. • - how can collaborators contribute to this development (if required)? Before beam (~Fall,2008): Remote development may be possible. After: No remote access for development will be allowed.
Others • Documentation • ??