Download
1 / 15
• 150 likes • 219 Views
Simultaneously Improving Glider Position

E N D
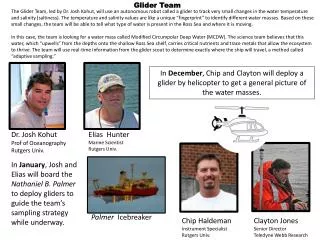
Simultaneously Improving Glider Position Estimates and Ocean State ForecastsOASIS, Inc., Patrick Cross, (808) 423-0011, cross@oasislex.com$404,649Short term goals: develop and test an iterative method for improved subsurface position estimates for ocean gliders Long term goal: integrate method with Navy 4D-Var ocean model data assimilation • Content of Presentation • Penta Chart: New method for position estimates • Importance – ocean models, raw interpretation • State of the Art – Linear dead reckoning, introduces errors in ocean state calculations/forecasts • Customer – Naval Oceanographic Office, IOOS • Project Plan and Timeline • Quantitative Goals and Success Criteria • Work Tasks/Costs/Level of Effort • Customer engagement plan • Project Plan and Schedule • Transition plan • Questions/Discussion and backup slides 1
Improved Underwater Glider Positions STATUS QUO QUANTITATIVE IMPACT END-OF-PHASE GOAL NEW INSIGHTS Developing a Method to Improve the Accuracy of Glider Subsurface Position Estimates • Improvements in NAVO support capabilities for ASW, MIW, NSW • Improved interpretation of raw glider data • Improved ocean model forecasts • MAIN ACHIEVEMENTS (Expected) • Develop glider kinematic model • Develop statistics relating to scale of positional issue by leveraging ONR field test in Phil Sea • Develop iterative technique, using high-res ocean model, to improve subsurface position estimates • Field test method in Hawaii using bottom transponders for accurate measured positions • HOW IT WORKS: • Kinematic model incorporates vehicle inertial mass, surface area, drag coefficients, seawater density, hydrodynamic forces (lift and drag) • Glider model takes output of ocean model, over time, to predict x, y, and z coordinates of glider position through course of dive • Glider data (T/S) is input back into ocean model at improved positions • Process is run iteratively to seek convergence and improved ocean state forecasts • ASSUMPTIONS AND LIMITATIONS: • Scale of possible positional improvement must exceed grid resolution of ocean model • Possibility that solution may not converge • Field validation very important to project • Gliders in use by Navy and others in growing numbers • Position during dive based on linear dead reckoning only • Take advantage of state-of-the-art ocean models • Develop glider kinematic model guided by ocean model • Input glider data into ocean model at improved positions • Glider kinematic model • Iterative technique developed • Field test in Hawaii 2 Glider data is increasingly prevalent. Improved positional data will greatly enhance its utility. Company: OASIS, Inc. Contact: Patrick Cross Email: cross@oasislex.com Phone: (808) 423-0011
Importance • Navy is committed to large fleet of ocean gliders (100 or more) through Littoral Battlespace Sensing, Fusion, and Integration (LBSFI) program • Characterization of Battlespace for ASW, MIW, NSW, EOD applications • Feed broad area ocean models • Glider fleet managed by Naval Oceanographic Office (NAVO) • Glider data is used in raw form and ingested into predictive ocean models, such as NAVO’s Navy Coastal Ocean Model (NCOM) • Gliders obtain GPS fix when on surface, but position is not known accurately once they dive • Can lead to errors in estimation of ocean state, and, when assimilated into an ocean model, errors in forecast fields • Our concept of using an ocean model, paired with a glider motion model, to provide enhanced subsurface glider positional accuracy is supported by NAVO (Dr. Frank Bub and Mr. James Rigney). Also, PMW-120 (Dr. Ed Mozley) has expressed interest in the method and would pick up funding beyond CEROS as part of LBSFI program. 3
State of the Art(no effort here yet) • Describe the state of the art and the state of the practice • Identify other individuals and research groups who are working on the problem (including alternative approaches) • Describe the ways in which your project will advance current knowledge and practice • Describe the technical challenges • Additional detail slide (or two… mindful of existing content already submitted in your written proposal, and time limits on presentation!) 4
Advancing the State-of-the-Art considers vehicle inertial mass, surface area, drag coefficients, seawater density, vehicle lift and drag Ocean Model (such as NCOM) Velocity Field Glider Model Assign glider T/S to revised x, y, z Estimated glider x, y, z vs time Crude effort at block diagram 5
Project endorsements Dr. Frank Bub, NAVO Ocean Modeling Technical Lead – interested and pressing endorsement through CNMOC Advisory Board Mr. James Rigney, NAVO Chief Scientist – “potentially useful to NAVO”, says CNMOC will formally endorse Dr. Ed Mozley, PMW-120 Asst. Program Manager – willingness to fund follow-on work through LBSFI Envisioned nature of customer relationships: Short term: Provision of NCOM model output, Guidance relating to method development Long term: Operational implementation of method in NAVO Reachback Cell Other sources of support, or related efforts: Leveraging SPAWAR PMW-120 EMPath project (part of LBSFI) Leveraging ONR Code 32 Deep Water Acoustics Philippine Sea 2010 test Methodology will have benefits in ocean and climate modeling in academia, at NOAA (IOOS Program), and elsewhere Customer – Naval Oceanographic Office (NAVO) 6
Methodology Develop glider kinematic model Run glider model during ONR Philippine Sea test Test will span ~5 months of Seaglider deployments Glider model fed with output from NAVO’s NCOM Actual surfacing positions compared with those forecast by glider model to generate statistics to assess degree of potential positional error Develop ocean model iterative technique Utilize high-resolution UH ROMS model Test iterative approach during Hawaii sea test ~ 2 weeks duration off leeward Oahu Utilize field of 8 bottom transponders 1000m dives, through transponder field Compare measured and predicted positions during analysis phase 7
Customer Engagement Plan (no effort here so far) 10
Transition Plans • Short-term transition of glider model, through LBSFI EMPath program, to NAVO for enhanced glider positional modeling • Longer-term transition of iterative method to NAVO ocean modeling group, after 4D Var data assimilation becomes operational • Will continue to update NAVO and PMW-120 on progress, and seek follow-on funds to move toward long-term transition • Identify transition partners • Obligated funding: none locked in, likely from PMW-120 (Mozley) • Leveraged funds: OASIS LBSFI funding for EMPath, OASIS/UH funding in ONR’s Deep Water Acoustics Philippine Sea program • Partners: Dr. Bruce Howe (bhowe@hawaii.edu), Dr. Brian Powell (powellb@hawaii.edu) of University of Hawaii – gliders, iterative technique, field test support • Endorsements: NAVO, CNMOC, PMW-120 • Expected Intellectual Property (IP) - ? 11
Simultaneously Improving Glider Position Estimates and Ocean State ForecastsOASIS, Inc., Patrick Cross, (808) 423-0011, cross@oasislex.com$404,649 Q&A / Discussion 12
Heilmeier Questions (Think these questions through very carefully and have lucid answers prepared) 14
Anticipated Transition Plan Class of Endorsements: 1) “We will help fund …” 2) ”If successful, we will do …” 3) “We will provide planes, vessels, people and will mentor and advise.” 4) “We are interested in the outcome.” Potential Interest, but no endorsements: Identify PEOs Identify Commands Current Systems Current Products Organizations and assets in position to benefit from project results and operational transition, but without firm, funded requirements: Program AandProgram Bleverage CEROS funding. Program of Record, funded Requirements Class-4 Endorsement Program B $xxx K Class-1 Endorsement Ongoing support, expanded project Class-2 Endorsement Program A $xxx K Class-1 Endorsement Facilitate ongoing tests and development Class-3 Endorsement Reach TRL4: For TRL 5-7: Add functionality, modules, capabilities CEROS $xxx K (Support Design/Planning And Proof of concept) Year 5 Year 1 Year 2 Year 3 Year 4 TRL 8 Integrated operationally TRL 4 Component Validation in Lab TRL 6 Prototype demo in relevant environment TRL 7 Prototype demo in operational environment TRL 9 Operationally and mission proven