Download
1 / 17
170 likes | 241 Views
RTM/NWP-BASED SST ALGORITHMS FOR VIIRS USING MODIS AS A PROXY B. Petrenko 1,2 , A. Ignatov 1 , Y. Kihai 1,3 , J. Stroup 1,4 , X. Liang 1,5 1 NOAA/NESDIS/STAR , 2 RTi , 3 Dell Perot Systems, 4 SSAI, 5 CIRA . Objectives.

E N D
RTM/NWP-BASED SST ALGORITHMS FOR VIIRS USING MODIS AS A PROXYB. Petrenko1,2, A. Ignatov1, Y. Kihai1,3, J. Stroup1,4, X. Liang1,51NOAA/NESDIS/STAR , 2RTi , 3Dell Perot Systems, 4SSAI, 5CIRA
Objectives • Currently, all operational SST retrieval algorithms use regression (AVHRR, MODIS; baseline SST algorithm for VIIRS) • Recent studies show that using RTM and NWP information can improve SST retrieval accuracy and cloud screening capabilities • At NESDIS, the exploration of RTM/NWP – based SST algorithms began within preparations for GOES-R ABI mission • Now the algorithms of this type are being tested for VIIRS. MODIS and AVHRR are used as proxy sensors. MODIS is focus of this presentation • Objectives: • Evaluate potential benefits of using RTM and NWP for SST retrieval and QC. • Create a back-up SST capability for VIIRS
Advanced Clear-Sky Processor for Oceans (ACSPO) • ACSPO was originally developed at NESDIS for operational processing of AVHRR data at a pixel resolution • Main ACSPO modules: • Community Radiative Transfer Model (CRTM) - simulates clear-sky BTs using Reynolds Daily SST and GFS atmospheric profiles. • SST module – incorporates SST algorithms • Clear-Sky Mask (CSM) - performs cloud screening using simulated clear-sky BTs and analysis SST rather than cloud models • The ACSPO infrastructure allows implementation and testing various SST algorithms
AVHRR data processing with ACSPO • Comparisons with other SST and cloud mask products (CLAVR-x; O&SI SAF) show that ACSPO performs comparably or better • Operational SST retrieval uses Regression • ACSPO produces quasi-Gaussian distributions of deviations of SST from Reynolds Daily SST for all AVHRRs flown on different satellites. ACSPO SST August 1-7, 2008 O&SI SAF SST
SST algorithms for GOES-R ABI MSG2 SEVIRI - REYNOLDS SST • The ACSPO was used to develop SST algorithms for GOES-R ABI using MSG2 SEVIRI as proxy • Regression and Optimal Estimation (OE) algorithms were implemented and tested. • New Incremental Regression (IncR) algorithm was developed. • The IncR provided the highest and the most uniform SST accuracy and precision Regression IncR OE Bias and SD of SEVIRI - In situ SST as functions of View Zenith Angle
Implementation of SST Algorithms for SEVIRI Optimal Estimation & Incremental Regression Regression Regression between TS and TB Simulation of clear-sky BTs, TB0 Correction of bias in TB0 IncR Regression between ΔTSand ΔTB OE SST “increments”, ΔTS=TS-TS0, are retrieved from BT “increments”, ΔTB =TB-TB0 , with RTM inversion • The Incremental Regression is • More accurate than Regression and OE • Faster and simpler to implement than OE • Correction of BT biases is implemented for SEVIRI as a standalone procedure
SST Algorithms for MODIS Incremental Regression Extended Regression Simulation of TB0 Regression between TSand TB with additional terms depending on NWP NWP data NWP data Regression between ΔTSand ΔTB with additional terms depending on NWP • Incremental Regression is simplified by correcting bias in retrieved SST: new NWP-dependent terms are added to the IncR equation • Extended Regression (ExtR) eliminates RTM simulations: NWP-dependent terms are added to the conventional regression equation. • Comparison of Conventional Regression with ExtR and IncR can reveal sequential improvements (if any) due to using NWP data and RTM
Extended Regression for MODIS NLSST (Day, 11 and 12 μm channels): TS = ao+a1 TB11+a2 TS0(TB11-TB12 )+a3 (TB11-TB12 )(sec-1) + + a4(sec-1) + a5W+ a6W2 + a7W3 MCSST (Night, 3.7, 11 and 12 μm channels): TS= ao+a1T4+a2T11+a3T12+a4 (T4-T12 )(sec-1)+ + a5(sec-1) + a6W+ a7W2 Θ is view zenith angle W is total precipitable column water vapor content TSis SST TS0is first guess SST TBλis observed BT The terms in white represent Conventional Regression; New NWP-dependent terms are shown in yellow
Incremental Regression for MODIS NLSST (Day, 11 and 12 μm channels): TS = TS0+ bo+b1 ΔTB11+b2TS0(ΔTB11- ΔTB12 ) + +b3 (ΔBT11- ΔTB12 )(sec-1) + b4(sec-1) + b5W+ b6W2 + b7W3 MCSST (Night, 3.7, 11 and 12 μm channels): TS = TS0 + bo+b1 ΔTB4+b2 ΔTB11+b3 ΔTB12+ + b4 (ΔTB4- ΔTB12)(sec-1)+ b5(sec-1) + b6W+ b7W2 ΔTBλ =TBλ - TBλ 0 Incremental regression equation replaces observed BTs with their deviations from the first guess, and first guess SST is added to the right-hand side of equation 9 9
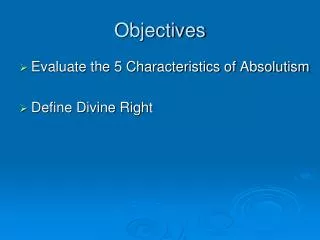
SD of Retrieved SST wrt In situ(September 2011) • IncR is more precise for two-channels split-window SST retrieval • ExtR is more precise for three channels SST retrieval • Monitoring of long-term trends in SST accuracy and precision is a subject of the future work
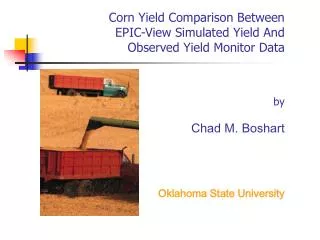
Terra MODIS: Images of BT – CRTM BT at 3.7μm and IncR SST – Reynolds BT – CRTM at 3.7 μm IncR SST – Reynolds • “Striping” in Terra-MODIS channels affects SST and Clear-Sky Mask
Aqua MODIS: Images of BT – CRTM BT at 3.75μm and ER SST – Reynolds ER SST – Reynolds BT – CRTM at 3.7 μm • SST retrieval and Clear-Sky Mask for Aqua-MODIS are also affected by striping 12
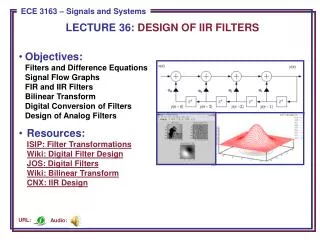
Daily Composite Maps of IncR SST – Reynolds SST (October, 15 2011) Terra- MODIS, NIGHT Aqua-MODIS, NIGHT Terra-MODIS, DAY Aqua-MODIS, DAY • Aqua – MODIS SST is warmer than Terra – MODIS SST in the daytime and colder in the nighttime
Histograms of IncR SST – Reynolds SST (October 15, 2011) • Mean Day/Night difference in SST - Reynolds SST: • Equator crossing times: Terra- MODIS Aqua- MODIS
Future work MODIS: Results shown here are preliminary Long-term monitoring of stability, accuracy and precision of SST Further enhancement of SST algorithms (including SST equations, bias correction and Clear-Sky Mask) VIIRS: Implement RTM/NWP-based SST algorithms Process VIIRS data quasi-operationally Compare with the baseline VIIRS SST algorithm and Cloud Mask
MODIS Aqua NLSST: Bias and SD wrt In situ as Functions of TPW and VZA • Bias of SST – In situ is within 0.1 K for both ER and IncR within the entire ranges of TPW and VZA • IncR slightly outperforms ER in terms of SD of SST – In situ 16
MODIS Aqua MCSST:Bias and SD wrt In situ as Functions of TPW and VZA • Bias of SST – In situ is well within 0.1 K for ER and IncR within the entire ranges of TPW and VZA • ER outperforms IncR in terms of SD of SST – In situ, due to insufficient correction of CRTM inaccuracy 17