Download
1 / 23
230 likes | 251 Views
MAPPER is a portable exploration robot designed to replace humans in military reconnaissance. It captures information about its surroundings and transfers data wirelessly for constructing a 2D bird's eye view of the environment. The robot is low power, low cost, and uses a simple trigonometry algorithm to eliminate blind spots. The goal is to have a working sensor array on a non-moving reference to create a map.

E N D
MAPPER: A Perfectly Portable Exploration Robot Rohan Balakrishnan (CSE) Conan Jen (EE) Andrew Lok (EE) Jonathan Tang (EE)
The Problem • Reconnaissance is always important for the military • With importance of human lives, robots are a perfect replacement.
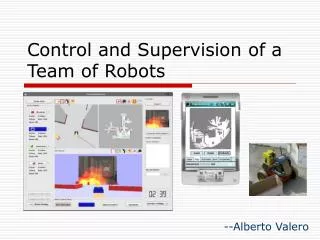
Our Solution • Robotic platform capturing information about its surroundings • Wireless communication link will transfer data back to PDA or laptop • Transferred data is then used to construct a 2-D bird's eye view of the environment
PDR Retorts • Potential market (the military, search and rescue teams) • Low Power • Low Cost (estimated final device cost $300) • Portable • Expendable • Software algorithm • Is not computationally intensive • Simple trigonometry • Overlaying points eliminates blind spots
MDR Specifications (Goal) • Working sensor array on non-moving reference(have multiple different reference points and combine it into a map) • Working software which will take distance measurements and display them on Java GUI. • No wireless for now
MDR Specifications • Specs met are in bold • Scan scope: 20'x20' indoor room • Method: Ultrasonic sensor mounted on stepper motor for 360 degree rotation • Scan time: 5-15 mins (to complete 20'x20' room) • Minimum detectable obstruction size: 1'x1' • Semi Autonomous movement • Wireless communications: 100+ ft • Weight: 1-2lbs • Expected Battery Life: 10 rooms per charge
Ultrasound Sensor • Controlled directly from the Arduino • Returns 4 ASCII characters (First character 'R' followed by distance) • Output is inverted • Range is 255 inches
Stepper Motor • Motor is connected to 4 pins leading out from the Arduino development board. • Draws on 5V power supply from Arduino. • Performs full 360 degree sweep and reset back to starting position in less than 10 seconds.
Arduino • We decided to use a standard Arduino development board with the Atmega 168 microcontroller. • Data received from ultrasound via Serial is captured using a Java program.
Software (Algorithm) • Java GUI takes input from text file (distances) • Distances recorded = polar graph of closest objects • Polar data converted to Cartesian • Data from multiple ranging points combined • Plots overlaid to triangulate on obstructions • More result measurements = more accurate plot • Simulated room before starting with real data
Room Scenario Figure: 3-D model of M-5 study room.
Current Cost Breakdown • PARTS / BUDGET • Ultrasound Sensor $28 • Stepper Motor $15 • Arduino Clone (ATmega168) Free (M5) • Total $43
Next steps • Complete system integration • Robot base/Movement
Questions? • Questions? Comments?