Download
1 / 45
450 likes | 606 Views
Equazioni Differenziali con Derive 6 Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce marcellopedone@tin.it marcello.pedone@istruzione.it marcellopedone@matematicamente.it. Presentazione.

E N D
Equazioni Differenziali con Derive 6 Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce marcellopedone@tin.it marcello.pedone@istruzione.it marcellopedone@matematicamente.it Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Presentazione Vedremmo di seguito le potenzialità del software Derive 6 per risolvere le equazioni differenziali ordinarie . Risolveremo le equazioni differenziali più note nella letteratura della matematica e tali equazioni saranno collocate nel periodo storico nel quale sono state formulate. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Vedremmo infine le potenzialità del software per trovare le soluzioni approssimate di equazioni differenziali ordinarie con il metodo di Picard e le confronteremmo con quelle trovate con il metodo di Taylor Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Premessa Il software Derive 6 permette di evitare calcoli lunghi e laboriosi per risolvere le equazioni differenziali. Tali calcoli possono essere eseguiti con delle semplici istruzioni; in questo modo lo studioso, anziché insegnare ed imparare noiose tecniche di calcolo, potrà concentrarsi realmente nella risoluzione di un problema nel quale sono coinvolte le equazioni differenziali. Bisogna premettere però che: per spostare l’esecuzione dei calcoli alla progettazione di un percorso risolutivo per risolvere un’equazione differenziale è necessario la conoscenza di base del calcolo([8]). Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Contenuti • Saranno trattate brevemente, le seguenti equazioni differenziali: • Equazioni differenziali ordinarie del primo ordine, • Equazioni differenziali a variabili separabili, • Equazioni differenziali esatte, • Equazioni omogenee del primo ordine, • Equazioni differenziali lineari del primo ordine, • Equazione di Bernoulli, • Equazione di Clairaut, • Equazioni differenziali ordinarie del secondo ordine, • Equazioni differenziali omogenee del secondo ordine a coefficienti costanti, • Equazioni differenziali lineari non omogenee a coefficienti costanti. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Equazioni differenziali ordinarie del primo ordine Ricordiamo che un’equazione differenziale ordinaria del primo ordine è un’equazione nella quale figura come incognita una funzione y=y(x) della variabile x e che lega la variabile x, la funzione y e la derivata prima della funzione: F(x, y, y’)=0 ([6]). Nel software Derive 6 , il file FirstOrderODEs.mth contiene le definizioni di alcune utili funzioni per trovare le soluzioni esatte di equazioni differenziali ordinarie del primo ordine. Le definizioni di funzioni contenute in FirstOrderODEs.mth vengono caricate automaticamente quando una di queste funzioni viene chiamata per la prima volta ([1]). Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
IL suffisso GEN Le funzioni aventi il suffisso GENrestituiscono una soluzione generale in termini di una costante simbolica. Funzioni con nomi senza il suffisso GEN restituiscono una soluzione particolare se vengono specificate le condizioni iniziali, oppure restituiscono una soluzione generale in termini di condizioni iniziali simboliche se non sono stati assegnati dei valori alle variabili per le condizioni iniziali. La variabile x denota la variabile indipendente mentre y quella dipendente. Inoltre la variabile x0 denota il valore iniziale di x mentre y0 quello iniziale di y. Non usare x o y come nomi di funzioni (dy/dx viene abbreviata in y'). N.B. In Derive non si può usare il simbolo di apostrofo o di apice singolo per denotare le derivate. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
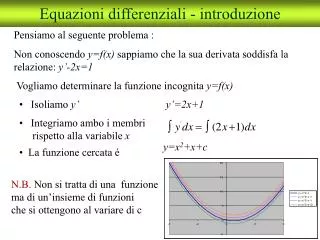
Soluzione carta e penna Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
DSOLVE1_GEN(p, q, x, y, c) restituisce una soluzione generale di un’equazione nella forma : p(x, y) + q(x, y)·y' = 0, in termini della costante simbolica c. DSOLVE1_GEN può risolvere equazioni esatte, lineari, separabili, omogenee o omogenee-generalizzate ed anche equazioni aventi un fattore di integrazione che dipende solo da x o solo da y. DSOLVE1(p, q, x, y, x0, y0) è simile a DSOLVE1_GEN, ma restituisce una soluzione particolare per la condizione iniziale y=y0 in x=x0. Queste condizioni iniziali possono essere numeri, variabili o espressioni generali. Nell’esempio precedente con la condizione iniziale y=1 in x=0: Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
VECTOR(x ^2·y + y= - c , c, 0, 5, 0.5) Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
VECTOR(e^x + y = c, c, 0, 5, 0.5) Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Nota storica Il termine ”equazione differenziale” è dovuto a Leibniz e la distinzione tra “ integrale generale e integrale particolare” è dovuta a Eulero. Nel secolo XVIII si precisano le notazioni e le regole sulle equazioni differenziali ([2]). Le funzioni restanti di DERIVE 6 che vediamo di seguito sono utili, soprattutto a scopo didattico per risolvere alcune forme particolari di equazioni differenziali. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Equazioni differenziali a variabili separabili (La separazione delle variabili fu proposta e risolta da Leibniz nel 1691 e da Bernoulli nel 1694) Un’equazione differenziale a variabili separabili si può scrivere nella forma y' = p(x)·q(y), dove p(x) è un’espressione che non contiene la y e q(y) è un’espressione che non contiene la x ([3]). Nel software Derive 6 , SEPARABLE_GEN(p, q, x, y, c) restituisce una soluzione generale implicita di un’equazione nella forma y' = p(x)·q(y), dove p(x) è un’espressione che non contiene la y e q(y) è un’espressione che non contiene la x. . SEPARABLE(p, q, x, y, x0, y0) è simile a SEPARABLE_GEN, ma restituisce una soluzione particolare per la condizione iniziale y=y0 in x=x0. Se supponiamo che la curva integrale passi per il punto (1,2) si ha Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Equazioni differenziali esatte (Le equazioni differenziali esatte furono integrate da Clairaut nel 1740 ([4])). Un’equazione differenziale esatta ha la forma p(x, y) + q(x, y) y' = 0 dove p e q sono funzioni continue con le loro derivate prime. Nel software Derive 6 , EXACT(p, q, x, y, x0, y0) restituisce una soluzione implicita dell’equazione differenziale nella forma p(x, y) + q(x, y) y' = 0, se questa equazione differenziale è esatta, altrimenti restituisce il messaggio "inapplicable". Questa equazione è esatta se e solo se dp/dy - dq/dx è equivalente a 0. EXACT_GEN(p, q, x, y, c)è simile a EXACT, ma restituisce una soluzione generale in termini della costante simbolica c. Se supponiamo che la curva integrale passi per il punto (1,2) si ha: Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Equazioni omogenee del primo ordine Le equazioni omogenee del primo ordine furono integrate da Leibniz nel 1693 e da Bernoulli nel 1697 e Manfredi nel 1714 Un’equazione omogenea del primo ordine è un’equazione differenziale nella forma y' = r(x, y) con r è omogenea. Nel software Derive 6 : HOMOGENEOUS(r, x, y, x0, y0) restituisce una soluzione implicita dell’equazione differenziale nella forma y' = r(x, y) se r è omogenea, altrimenti restituisce il messaggio "inapplicable". In questo contesto, un’espressione si dice omogenea se, sostituendo k·x a x e k·y a y nell’espressione, si ottiene un’espressione equivalente. Spesso le espressioni omogenee consistono in un rapporto tra due polinomi in x e y, con gli esponenti di x e di y completi in ogni termine. Gli argomenti di qualsiasi sotto-espressione irrazionale devono essere anch’essi omogenei. HOMOGENEOUS_GEN(r, x, y, c) è simile a HOMOGENEOUS, ma restituisce una soluzione generale in termini della costante simbolica c se r è omogenea. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Se supponiamo che la curva integrale passi per il punto (1,2) si ha: Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Equazioni differenziali lineari del primo ordine L’equazione lineare fu presa in considerazione da Bernoulli nel 1726 ma già nel 1694 Leibniz aveva trovato la formula risolutiva. Un’equazione differenziale del primo ordine si dice lineare quando la funzione incognita y e la sua derivata prima y’ non figurano con esponente maggiore di uno: y’+ p(x)y=q(x) dove p(x) e q(x) sono funzioni continue di x. Se q(x)=0 l’equazione si dice omogenea. Nel software Derive 6 : LINEAR1(p, q, x, y, x0, y0) restituisce una soluzione esplicita dell’equazione differenziale : y' + p(x)·y = q(x). Quest’ equazione non deve essere lineare in x: deve essere lineare solo in y e nella sua derivata. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Se supponiamo che la curva integrale passi per il punto (1,-3) si ha: Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Equazione di Bernoulli L’equazione lineare fu proposta e risolta da Bernoulli nel 1696 nello stesso anno Leibniz la integro con due quadrature e poi con la riduzione ad un’equazione lineare. Un’equazione differenziale del primo ordine si dice di Bernoulli se si presenta nella forma: y’+ p(x)y=q(x)yn dove p(x) e q(x) sono funzioni continue di x in un certo intervallo ed n è un numero reale. Nel software Derive 6 : BERNOULLI_ODE(p, q, k, x, y, x0, y0) restituisce una soluzione implicita dell’equazione di Bernoulli y' + p(x)·y = q(x)·y^k, dove k è una costante. BERNOULLI_ODE_GEN(p, q, k, x, y, c) è simile a BERNOULLI_ODE, ma restituisce una soluzione generale in termini della costante simbolica c.. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Se supponiamo che la curva integrale passi per il punto (1,-3) si ha: Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Equazione di Clairaut L’ equazione di Clairaut è un’equazione differenziale del tipo y= xy’+ f(y’) dove f(y’) è definita e continua in un intervallo nel quale f’’(y’)0 Nel software Derive 6 : CLAIRAUT(p, q, x, y, v, c) risolve l’equazione di Clairaut generalizzata, che ha la forma p(x·v - y) = q(v), dove p e q sono delle funzioni qualsiasi e v è una variabile che rappresenta y'. CLAIRAUT restituisce un vettore: la prima componente è una soluzione generale contenente una costante arbitraria c; la seconda componente è un’equazione che si può provare a risolvere algebricamente per v (se si riesce, sostituire l’espressione per v nell’equazione differenziale per ottenere una soluzione particolare). Risolvendo la seconda componente per v in termini di x e y, si ottiene: Sostituendo il secondo membro di questo risultato a y' nell’equazione differenziale originale si ottiene la soluzione particolare implicita. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Equazioni differenziali ordinarie del secondo ordine Ricordiamo che un’equazione differenziale ordinaria del secondo ordine è un’equazione nella quale figura come incognita una funzione y=y(x) della variabile x e che lega la variabile x, la funzione y , la derivata prima e la derivata seconda della funzione ([6)] F(x, y, y’,y’’)=0 Nel software Derive 6 : Il file SecondOrderODES.mth contiene le definizioni di alcune utili funzioni per trovare le soluzioni esatte di equazioni differenziali ordinarie del secondo ordine. Le definizioni di funzioni contenute in SecondOrderODES.mth vengono caricate automaticamente quando una di queste funzioni viene chiamata per la prima volta ([7]). In Derive non si può usare il simbolo di doppio apice per denotare le derivate seconde. DSOLVE2(p, q, r, x, c1, c2) restituisce una soluzione generale esplicita dell’0equazione differenziale ordinaria del secondo ordine lineare y" + p(x)·y' + q(x)·y = r(x) in termini delle costanti arbitrarie c1 e c2. Notare che gli ultimi due argomenti possono essere omessi se sono delle variabili e se per esse possono andare bene i nomi c1 e c2. DSOLVE2 può trovare facilmente una soluzione se p e q sono due costanti numeriche. Se q è una costante simbolica, il risultato avrà una forma più appropriata (sinusoidale anziché esponenziale) se q è stata dichiarata positiva o negativa. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Se si vuole trovare una soluzione particolare per certe condizioni iniziali o al contorno numeriche o simboliche, è meglio usare DSOLVE2_IV o DSOLVE2_BV che restituiscono direttamente soluzioni particolari. Altrimenti, dopo aver trovato una soluzione generale con DSOLVE2, si possono sostituire queste condizioni nella soluzione generale, risolverla in c1 e c2 e poi sostituire questi valori nella soluzione generale. DSOLVE2_BV(p, q, r, x, x0, y0, x2, y2) è simile a DSOLVE2, ma restituisce una soluzione particolare che soddisfa le condizioni al contorno y=y0 in x=x0 e y=y2 in x=x2. DSOLVE2_IV(p, q, r, x, x0, y0, v0) è simile a DSOLVE2_BV, ma restituisce una soluzione particolare che soddisfa le condizioni iniziali y=y0 e y'=v0 in x=x0. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Equazioni differenziali omogenee del secondo ordine a coefficienti costanti (Le equazioni lineari a coefficienti costanti furono integrate da Eulero nel 1750). Un’equazione differenziale omogenee del secondo ordine a coefficienti costanti, è un equazione del tipo: y" + p·y' + q·y = 0, con p e q numeri reali Nel software Derive 6 : LINEAR1(p, q, x, y, x0, y0) restituisce una soluzione esplicita dell’equazione differenziale : y' + p(x)·y = q(x). Quest’equazione non deve essere lineare in x: deve essere lineare solo in y e nella sua derivata. Si possono verificare tre casi dipendenti dalle soluzioni dell’equazione caratteristica. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Equazioni differenziali non omogenee del secondo ordine a coefficienti costanti Un’equazione differenziale omogenea del secondo ordine a coefficienti non costanti, è un’equazione del tipo :y" + p·y' + q·y = f(x), con p e q numeri reali. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Conclusione Nel risolvere un’equazione differenziale con il software Derive 6 è necessario conoscere la teoria e come affermato nell’introduzione: per spostare l’esecuzione dei calcoli alla progettazione di un percorso risolutivo per risolvere un’equazione differenziale è necessaria la conoscenza di base del calcolo. Dice il Professor Bernhard Kutzler: Pe. C.A.S.( (Pedagogical Computer Algebra System ovvero utilizzo pedagogico dei Sistemi di calcolo algebrico) è, secondo me, un modo di utilizzare meglio questi Sistemi di calcolo algebrico nell’insegnamento della Matematica, migliorando sia l’insegnamento sia la qualità e la quantità di Matematica che s’insegna. Importante è porre al centro di tutto il processo lo studente: lo studente deve imparare matematica con i CAS ([8]). Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Riferimenti bibliografici • AURELIA ORLANDONI, Derive nella scuola secondaria superiore,IRRE Emilia Romagna • BERNHARD KUTZLER & VASTA KOKOL-VOLJC , Introduzione a Derive 6 , Texas Instruments, Austria 2003. • CARL B.BOYER , Storia della matematica, Mondatori 1980 • PAOLO MARCELLINI – CARLO SBORDONE , Esercitazione di matematica 2° volume Parte prima, Liguori editore, 1995 • G. ZWIRNER- L. SCAGLIANTI , Argomenti di analisi, Cedam,1995 • MARCELLO PEDONE,Equazioni Differenziali con Derive 6: • http://www.matematicamente.it/derive/equazioni_differenziali.pdf • MARCELLO PEDONE ,Appunti di analisi matematica per l'università: http://www.matematicamente.it/analisi/ • MARCELLO PEDONE ,Problemi di Cauchy ed equazioni differenziali con Derive:http://www.matematicamente.it/derive/ • http://matematica.uni-bocconi.it/derive6/derive6.htm Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Soluzioni approssimate di equazioni differenziali ordinarie con il metodo di Picard e confronto con il metodo di Taylor Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Di seguito si descrivono e si confrontano i metodi di Picard e quello di Taylor per trovare le soluzioni approssimate delle equazioni differenziali ordinarie. Per il confronto e il calcolo delle soluzioni approssimate viene usato il software Derive 6, con il quale saranno tracciate tutte le curve che rappresentano sia le soluzioni esatte, sia quelle approssimate delle equazioni differenziali prese in esame. In conclusione si mostrerà l’utilità del “campo di direzioni”. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Precedentemente abbiamo descritto i file FirstOrderODES.mth e SecondOrderODES.mth e i metodi per trovare le soluzioni esatte per le equazioni differenziali ordinarie. Di seguito sono riportate le istruzioni per risolvere l’equazione differenziale (#1), con le condizioni X0=0;Y0=1. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Il grafico della soluzione trovata è il seguente: Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Talvolta capita che nessuno dei metodi conosciuti possa essere applicato ad un’equazione oppure che il risultato ottenuto non sia convertibile in una forma esplicita. Può capitare che l’equazione differenziale in questione non sia risolvibile mediante le funzioni di Derive, oppure che si debba risolvere un sistema di equazioni differenziali. Il file ODEApproximation.mth contiene le definizioni di alcune funzioni per risolvere le più comuni equazioni differenziali ordinarie e sistemi di tali equazioni mediante sviluppi in serie troncati e metodi di approssimazione numerica. Le definizioni di funzioni contenute in ODEApproximation.mth vengono caricate automaticamente quando una di queste funzioni viene chiamata per la prima volta(guida di Derive 6). Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Serie di Taylor troncata di ordine n Per trovare le Soluzioni in serie per le equazioni differenziali ordinarie si usa l’istruzione TAYLOR_ODE1(r, x, y, x0, y0, n) che restituisce la serie di Taylor troncata di ordine n della soluzione dell’equazione y' = r(x, y) con le condizioni iniziali y=y0 e x=x0. Di seguito sono riportate le serie di Taylor per l’approssimazione dell’equazione differenziale #1. La #7 è un’approssimazione al secondo ordine, la #9 al terzo ordine, la #11 al quarto ordine e la #13 al quinto ordine. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Per verificare che queste sono soluzione in serie che approssimano la soluzione dell’equazione differenziale, basta sostituire questa soluzione a y nella differenza tra i due membri dell’equazione senza semplificare. Poi usare il comando Calcola > Serie di Taylor per verificare che la serie di Taylor di tale differenza troncata al terzo grado vale 0. TAYLOR_ODE1 restituisce ? se r non è sufficientemente differenziabile per una serie troncata di ordine n. In tal caso, provare con un valore di n inferiore(guida di Derive 6). Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Nella figura che segue sono riportati i grafici per le cinque approssimazioni effettuate; chiaramente all’aumentare dell’ordine di troncamento le curve si avvicinano sempre di più alla curva che rappresenta la soluzione esatta (curva di colore rosso) Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Metodo di Picard Il metodo di Picard costituisce una versione migliorata per la soluzione di un’equazione approssimata in serie. L’istruzione PICARD(r, p, x, y, x0, y0) restituisce una versione migliorata della soluzione approssimata in serie dell’equazione y' = r(x, y), data la soluzione approssimata in serie p(x). Di solito, sviluppando rispetto a x, si ottiene una forma più utile che non semplicemente semplificando l’espressione. Il metodo di Picard utilizza l’integrazione di r(x, p(x)). Se non rimangono integrali nel risultato semplificato, si può tentare un’altra iterazione usando l’approssimazione migliorata per p, e così via. Se non si ha una buona prima approssimazione, allora usare la costante y0. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Consideriamo sempre la stessa equazione differenziale con y=1 in x=0. Utilizzando TAYLOR_ODE1 si ricava che il secondo membro dell’equazione è sufficientemente differenziabile solo per la soluzione sviluppata in serie di Taylor troncata al primo ordine, +1. Di conseguenza, usando questo come prima approssimazione, si ottiene: Dove si è utilizzata la seconda approssimazione come secondo argomento della funzione PICARD per ottenere una terza approssimazione Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Ora si può utilizzare questa terza approssimazione come secondo argomento della funzione PICARD per ottenere una quarta approssimazione, e così via. Notare che i termini di grado massimo generati col metodo di Picard sono spesso errati. Sono poco attendibili i termini che non hanno gli stessi coefficienti in due iterazioni successive. Per questo motivo e per motivi di efficienza, conviene scartare i termini di ordine superiore al primo termine di ordine superiore rispetto all’iterazione precedente. Se qualche iterazione porta ad un risultato contenente un integrale, si può provare ad approssimare r(x, p(x)) per poter eseguire l’integrazione. (guida di Derive 6). Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Nella figura che segue sono riportati i grafici per le cinque approssimazioni effettuate, chiaramente anche in questo caso con le successive approssimazioni le curve si avvicinano sempre di più alla curva che rappresenta la soluzione esatta (curva di colore rosso) e in questo caso rispetto al metodo precedente si nota già una migliore approssimazione. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Nella figura che segue sono riportati i grafici ottenuti con le approssimazioni effettuate con i due metodi, dal confronto si nota che all’aumentare dei vari passi(step) le curve si avvicinano sempre di più alla curva che rappresenta la soluzione esatta (curva di colore rosso) e che con il metodo di Picard si ha una migliore approssimazione. L’istruzione PICARD può anche essere usata per trovare le soluzioni approssimate in serie di sistemi di equazioni differenziali del primo ordine. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Campo di direzioni Un campo di direzioni serve per dare un’interpretazione “visiva” dell’equazione .Se la soluzione passa per il punto P(0,1) allora l’equazione permette di calcolare la derivata di y(x) in questo punto y’(0)=0-y(1), associamo dunque a tale punto la direzione della corrispondente tangente a y(x) nel punto di ascissa 0. Al variare del punto nel piano si determina un campo di direzioni. Le soluzioni seguono in ogni punto la direzione associata, il passaggio per un punto individua una sola soluzione L’istruzione DIRECTION_FIELD(r, x, x0, xm, m, y, y0, yn, n) restituisce una matrice di vettori a due componenti che quando vengono tracciati rappresentano un campo di direzioni per l’equazione y'=r(x,y). x varia da x0 fino a xm in m passi, mentre y varia da y0 fino a yn in n passi. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Prima di tracciare il grafico, bisogna usare il comando Opzioni > Visualizzazione > Punti della finestra grafica 2D per connettere i punti finali dei segmenti tangenti e per usare punti piccoli. Ad esempio, per tracciare un campo di direzioni per l’equazione si approssima l’espressione e poi si traccia il risultato in una finestra Grafica 2D, utilizzando punti piccoli e collegandoli. Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce
Vi ringrazio per avermi ascoltato e mi scuso se vi ho annoiato! Marcello Pedone Equazioni Differenziali con Derive 6 Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce marcellopedone@tin.it marcello.pedone@istruzione.it marcellopedone@matematicamente.it Marcello Pedone I.I.S.S.S. “A. De Pace”di Lecce