Download
1 / 1
10 likes | 156 Views
A 3D reconstruction from real-time stereoscopic images using GPU. GOMEZ-BALDERAS, Jose-Ernesto, GIPSA-lab, Jose-Ernesto.Gomez-Balderas@gipsa-lab.grenoble-inp.fr HOUZET, Dominique, GIPSA-lab, Dominique.Houzet@gipsa-lab.fr. Abstract

E N D
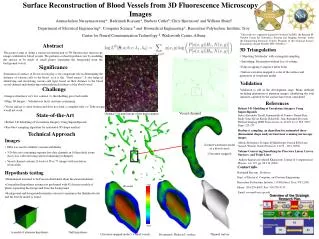
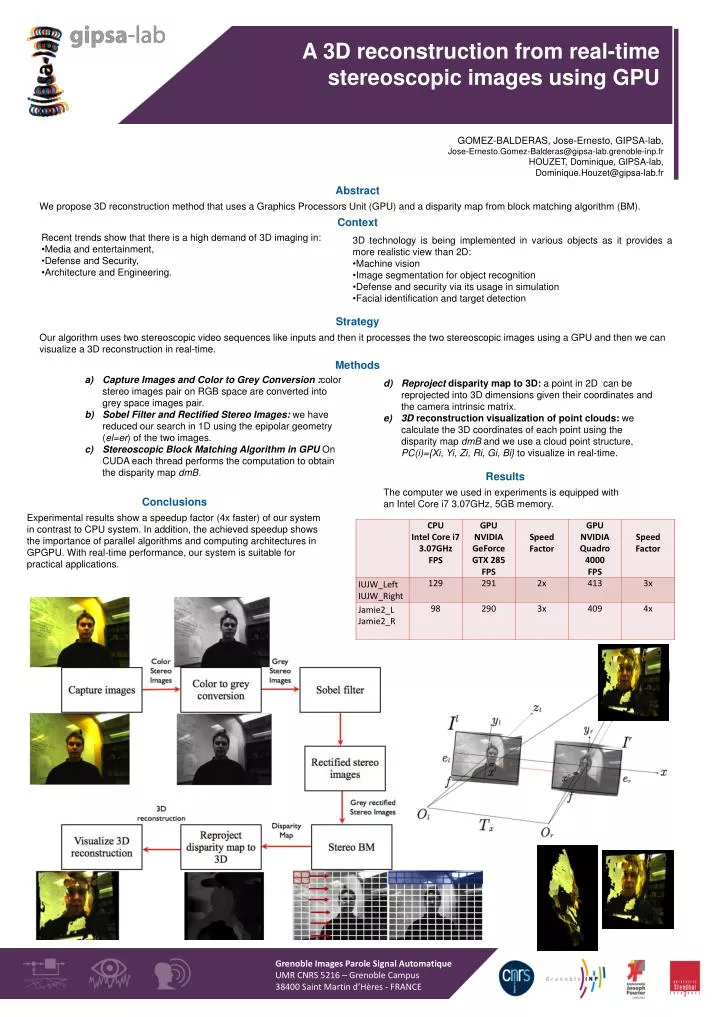
A 3D reconstruction from real-time stereoscopic images using GPU GOMEZ-BALDERAS, Jose-Ernesto, GIPSA-lab, Jose-Ernesto.Gomez-Balderas@gipsa-lab.grenoble-inp.fr HOUZET, Dominique, GIPSA-lab, Dominique.Houzet@gipsa-lab.fr • Abstract • We propose 3D reconstruction method that uses a Graphics Processors Unit (GPU) and a disparity map from block matching algorithm (BM). • Context • Strategy • Our algorithm uses two stereoscopic video sequences like inputs and then it processes the two stereoscopic images using a GPU and then we can visualize a 3D reconstruction in real-time. • Methods • Recent trends show that there is a high demand of 3D imaging in: • Media and entertainment, • Defense and Security, • Architecture and Engineering. • 3D technology is being implemented in various objects as it provides a more realistic view than 2D: • Machine vision • Image segmentation for object recognition • Defense and security via its usage in simulation • Facial identification and target detection Capture Images and Color to Grey Conversion :color stereo images pair on RGB space are converted into grey space images pair. Sobel Filter and Rectified Stereo Images: we have reduced our search in 1D using the epipolar geometry (el=er) of the two images. Stereoscopic Block Matching Algorithm in GPU On CUDA each thread performs the computation to obtain the disparity map dmB. Reproject disparity map to 3D: a point in 2D can be reprojected into 3D dimensions given their coordinates and the camera intrinsic matrix. 3D reconstruction visualization of point clouds: we calculate the 3D coordinates of each point using the disparity map dmB and we use a cloud point structure, PC(i)={Xi, Yi, Zi, Ri, Gi, Bi} to visualize in real-time. Results The computer we used in experiments is equipped with an Intel Core i7 3.07GHz, 5GB memory. Conclusions Experimental results show a speedup factor (4x faster) of our system in contrast to CPU system. In addition, the achieved speedup shows the importance of parallel algorithms and computing architectures in GPGPU. With real-time performance, our system is suitable for practical applications. Grenoble Images Parole Signal Automatique UMR CNRS 5216 – Grenoble Campus 38400 Saint Martin d’Hères - FRANCE