Download
1 / 17
200 likes | 519 Views
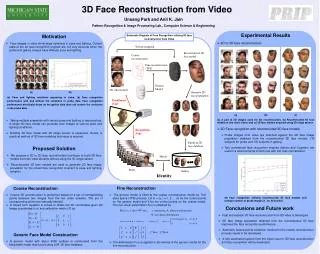
3D reconstruction from uncalibrated images. Young Ki Baik CV Lab. Contents. Introduce Basic geometrical theory Overview – 3D reconstruction Conditions for 3D reconstruction and Solution Correspondence Camera parameters and motion Results Experimental results and demonstration

E N D
3D reconstruction from uncalibrated images Young Ki Baik CV Lab
Contents • Introduce • Basic geometrical theory • Overview – 3D reconstruction • Conditions for 3D reconstruction and Solution • Correspondence • Camera parameters and motion • Results • Experimental results and demonstration • Future Works
Introduction(1) • Mapping to images 3D point 3D object mapping Image plane Camera Camera Camera system for obtaining images
Introduction(2) • 3D reconstruction from images • Point correspondence • Camera parameter and motion 3D point 3D object Camera Camera 3D reconstruction system to make 3D object
3D reconstruction from uncalibrated images • Overview Image Sequence Feature Extraction/ Matching Relating Image Projective Reconstruction Auto-Calibration Dense Matching 3D Model Building
Conditions for 3D reconstruction • Correspondence • Feature extraction • Harris corner method • SIFT method • ScaleInvariantFeatureTransform • Initial feature matching • Template matching (Image base descriptor) • Descriptor (SIFT-d, PCA-d, SIFT-d+PCA-d, …) • Feature matching • RANdom SAmple Consensus • To eliminate outlier
Conditions for 3D reconstruction • Correspondence • Guide matching • To get more correspondence • Using previous features and Geometry information About 2 times more correspondence Geometry based distance value using fundamental matrix Correlation based cost value
Conditions for 3D reconstruction • Camera parameter and motion (Using Self-calibration) • Dual Absolute Conic • Hartley ’94 / Hartley ’99, David Nistér IJCV 2004 ( + cheirality solution ) • Dual Absolute Quadric • Triggs’97 • M.Pollefeys et al. PAMI’98, ECCV 2002, IJCV 2004 Dual Absolute Quadric M. Pollefeys
Conditions for 3D reconstruction • Constraints for self-calibration • Constant internal parameter • Fixed camera K1 = K2 = … • Known internal parameter • Rectangular pixel : s = 0 • Square pixel : s = 0, fx = fy • Principle point known : ( ux , uy ) = image center
Experiments and results • Result using rig • Rig • Calibration using vanishing point • DAQ (using weighted linear equation) Using the calibration rig information Using the manual vanishing points input Self-calibration result using rig correspondence only Self-calibration result is similar to the method using calibration rig.
Experiments and results • Real scene test • Assuming that self-calibration works well
Experiments and results • Manual input to check self-calibration results • Points : Correspondence information • Line : Connection information
Experiments and results • Test 1 (Pinball machine : 3 images) • Key points • Match
Experiments and results • Test 2 (Mask : 3 images) • Key points • Match
Experiments and results • Test 3 (Building : 6 images) • Key points • Match
Experiments and results • Test 4 (House : 5 images) • Key points • Match
Future works • Quasi-Dense matching technique and reconstruction • To get more reliable results • Full side 3D reconstruction • Using attaching algorithm • Bundle adjustment algorithm • To reduce error • Full 3D reconstruction system • Dense matching and 3D modeling