Download
1 / 17
170 likes | 349 Views
Personal Navigation System. Jari Saarinen , Jussi Suomela, Seppo Heikkilä, Mikko Elomaa and Aarne Halme Helsinki University of Technology Automation Technology laboratory Finland. Project funded by the European Community under the IST programme Future and Emerging Technologies. Partners.

E N D
Personal Navigation System Jari Saarinen, Jussi Suomela, Seppo Heikkilä, Mikko Elomaa and Aarne Halme Helsinki University of Technology Automation Technology laboratory Finland Project funded by the European Community under the IST programme Future and Emerging Technologies Jari Saarinen
Partners • CTU: Czech Technical University, Gerstner Laboratory (CZ) Coordinator • Certicon: CertiCon a.s. (CZ) • HUT: Helsinki University of Technology, Automation Technology Lab.(FI) • JMUW: Bayerische Julius-Maximilians Universität Würzburg (DE) • ARS: Steinbeis GmbH & Co. für Technologietransfer (DE) Jari Saarinen
IntroductionPeLoTe = Building Presence through Localization for Hybrid Telematic Systems Scenario • Human and Robotic entities (HE, RE) explore common area with the help of operator • Both provide continuous mapping data from environment • Mapping information is processed to a common presence for both entities • Case example: Fire fighting Jari Saarinen
Related Work • Infrastructure based tracking for indoors: • Ekahau Positioning Engine (WLAN) • PinPoint Asset Tracking System (RFID) • Space Systems Finland Pseudolite GPS • GSM based localisation • Standalone systems • Pedometers (distance/steps taken) • PointResearch DRM-III (Position based on steps and compass) • Nike Triax V-10 (Speed and distance) Jari Saarinen
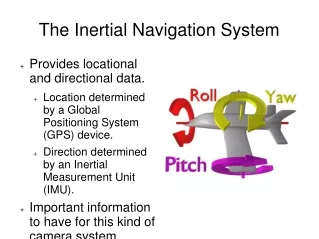
Personal Navigation System - PeNa • Standalone dead reckoning system for human indoor positioning • Stride length measurement unit • Compass • Gyro • Laser odometry • Laser also used for metric mapping and a priori map localisation • WLAN, UI, Power, Camera, Audio Jari Saarinen
Heading Estimation • Absolute heading from compass (3DM-G) • Fibre optic gyro for rapid movements • The compass is very sensitive to electrical and magnetic fields in indoors • The gyro drifts approx. 2 deg/min • Fusion with standard Kalman filter Jari Saarinen
Step Length estimation • SiLMU (Stride length measuring unit, lab-made) • US based ankle distance meter • 60Hz continuous measurement • Microcontroller calculates the stride based on Time-Of-Flight • Provides accurate information of the leg movement • Used with heading information the result is comparable to the odometry Jari Saarinen
Using Laser For Localisation • The laser scan matching provides not only information about movement but also environmental data (Map) • Laser odometry provides accurate estimate of movement • Main problems are swinging and placement in human body, especially floor and ceiling echoes Jari Saarinen
Correlation Algorithm for Scan Matching • Generate a set of poses, relative to reference scan. • Transform current scan according to pose. • For every point in current scan find nearest neighbour in reference scan. If neighbour closer than a threshold increase hit count. • After going through all the poses, select the pose that has the biggest hit value. Improvements: • Coarse-to-fine search • Not changing the reference scan while there is enough information between current scan and reference scan • Least squares estimation for best estimate Jari Saarinen
Dead Reckoning results • Test result using the integrated system • Green path is integrated using SiLMU and Heading • Red path is integrated position after scan matching • Total Path: 404,4m • Time Elapsed: 475,5s • End-Start Error: 9,9m • Relative Error: 2,45% • Heading error: 18 deg Jari Saarinen
Dead Reckoning results - II Jari Saarinen
Current Development • Faster and more robust Scan Matching • Angle histogram matching • Better 2D correlation for position • Map Based methods • Using Correlation • Monte Carlo Localisation • SLAM • Cooperative Localisation • Using beacons • Operator assisted localisation • Integration to whole system Jari Saarinen
Current Development - II SLAM Operator Tools MCL Testing (with “end users”) Beacon system Jari Saarinen
Conclusions and future work • Standalone indoor localisation system for human was presented • Dead reckoning using SiLMU, compass, gyro and laser • Results are similar to dead reckoning of robots • Used already for map based localisation and initial tests with SLAM • Currently the whole system is in integration phase • First results with integration in the end of October • End user testing in the end of November Jari Saarinen
PENA VIDEO Jari Saarinen