Download
1 / 20
200 likes | 324 Views
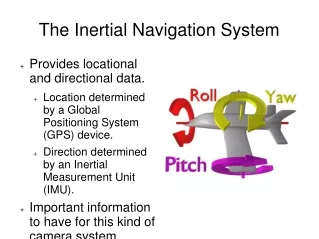
Pilot Navigation System. developed by Maritime University of Szczecin. Stefan Jankowski. Introduction. Limitations when navigate at constrained water areas: Weather conditions, Visibility, Night-time , Dense traffic . Introduction. Potential users of PNS: pilots, ferries,

E N D
Pilot Navigation System developed by Maritime University of Szczecin Stefan Jankowski
Introduction Limitations when navigate at constrained water areas: • Weather conditions, • Visibility, • Night-time, • Dense traffic.
Introduction Potential users of PNS: • pilots, • ferries, • other vessels permanently navigate at definite area.
Prediction subsystem – hydrodynamic model Electronic chart (Data base) DGPS Collecting information subsystem Data processing Subsystem Visualization of navigation information Subsystem Gyro Rudders Bow thrusters Propellers Wind Stationary PNS
Prediction subsystem – extrapolation model Electronic chart (Data base) Compass DGPS Collecting information subsystem Data processing Subsystem Visualization of navigation information Subsystem Manual data collection Portable PNS
Development PNS principles: • precisely determination of vessel’s position at restricted area; • suitable type and content of information; • suitable form of presentation of that information
Development Tools and methods : • Optimization of information in PNS; • Visualization of optimal information; • Creation of very specific Electronic Chart; • Methods for adjusting vessels waterline; • Tools for assessment and verification of satellite positioning systems.
Optimization of information The optimal set of information should enable to make a planned manoeuvre: • safe; • in given time; • in given conditions.
Optimization of information The optimal set of information : • heading; • course over ground; • speed over ground; • distances to the berth; • safe depth contour; • rate of turn; • cross speed.
Visualization Shore visualization
Visualization Fairway visualization
Chart – safety contour V2 > V1 T2 > T1 Result: new safety contour displayed on the chart
Positioning subsystem The most favourable solutions: • stationary PNS - positioning subsystem made up of DGPS receiver and gyrocompass (p = 1.3 m); • portable PNS - positioning subsystem made up of compass GPS (p = 1.5 m).
Summary This system is not a standardized electronic chart and has following distinctive features: • integration with the water area, • integration with the vessel, • optimal information, • optimal user’s interface, • predicting and supporting manoeuvring.
Summary Portable version - pilots.
Summary Stationary version – ferries