Download
1 / 1
10 likes | 84 Views
Predicting Object Dynamics from Visual Images through Active Sensing Experiences. Shun Nishide , Tetsuya Ogata , Kazunori Komatani and Hiroshi G. Okuno Dept. of Intelligence Science and Technology, Kyoto University, JAPAN Jun Tani Brain Science Institute , RIKEN, JAPAN.

E N D
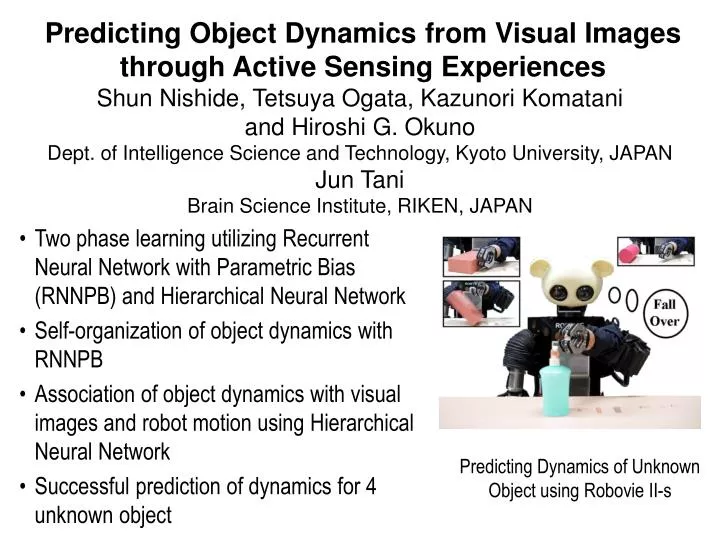
Predicting Object Dynamics from Visual Images through Active Sensing Experiences Shun Nishide, Tetsuya Ogata, Kazunori Komatani and Hiroshi G. Okuno Dept. of Intelligence Science and Technology, Kyoto University, JAPANJun TaniBrain Science Institute, RIKEN, JAPAN • Two phase learning utilizing Recurrent Neural Network with Parametric Bias (RNNPB) and Hierarchical Neural Network • Self-organization of object dynamics with RNNPB • Association of object dynamics with visual images and robot motion using Hierarchical Neural Network • Successful prediction of dynamics for 4 unknown object Predicting Dynamics of Unknown Object using Robovie II-s