Download
1 / 20
210 likes | 442 Views
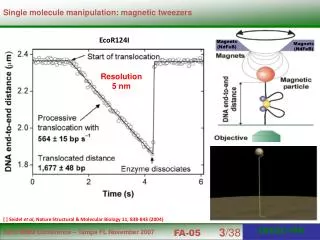
Single Tapered Fibre “Optical Tweezers ”. Steven Ross GERI-CEORG Supervisors: Professor D. Burton, Dr. F. Lilley & Dr. M. Murph y. Contents. Project Aim What is Optical Trapping? Optical Forces & Optical Trapping Theory Difference Between Classical & Fibre Based “Optical Tweezers”

E N D
Single Tapered Fibre “Optical Tweezers” Steven Ross GERI-CEORG Supervisors: Professor D. Burton, Dr. F. Lilley & Dr. M. Murphy
Contents • Project Aim • What is Optical Trapping? • Optical Forces & Optical Trapping Theory • Difference Between Classical & Fibre Based “Optical Tweezers” • Fibre Trapping at Low Insertion Angles; The Problem, Solution & the Resultant Change in Trap Dynamics • Experimental methods, Particle Tracking, Force Determination & Results • Conclusion
Project Aim • To develop a 3D-single beam optical trap • To aid investigations of the mechanical properties of cells • Capable of easy integration with other microscopy applications for example AFM • Therefore some degree of portability required • Leading to the development of an optical fibre based configuration
Optical Forces • Forces generated up to 200 x 10-12 N • Scattering force - Due to reflection, points in the direction of the beams propagation • Gradient force - Due to refraction, points in the direction of the beams high intensity region
Optical Trapping Theory • Scattering force must be cancelled – • counter propagating beams • gravity • Single beam trapping • gradient force must be greater than scattering force • Achieved by strongly focusing the laser • Creating a high intensity Gaussian profile 1 2 3
Classical “Optical Tweezers” • First demonstrated by Arthur Ahskin in 1986 • High NA microscope objective used for focusing the laser and imaging • Photo detectors for position detection • Multiple trapping sites • Particle transit in X and Y plane • Large surface are required
Single Tapered Fibre “Optical Tweezers” • Advantages • Reduced size and build costs • No position detection • Decoupled from the microscope • Capable of sample elevation • Disadvantages • Complexity increases for multiple trapping sites • Fibre tips manufactured to focus the light • Prone to damage
Fibre Trap “to be or not to be”? • Literature suggests optimum trapping forces found at fibre insertion angles between 45-55° • Oh dear major problem • AFM has a head above the sample chamber • Insertion angle no greater than 10°
Trapping at Low Insertion Angles • First Fibre tip (tip # 44) trapped at 45° Insertion angle • But not at 10° • Why is this? After all its just a beam of light incident upon a spherical object • Lead to investigations of the tip profile
Trapping at Low Insertion Angles • Taper profile was such that the particle had to be elevated • Requiring very high optical powers in excess of 600 mW • Lead to the development of new tips with different profiles • Requiring a longer taper and a smaller diameter tip
New Slim Models • Created 3 new working tips • # 92, 94 & 96 • Successfully tested at 45°, 30° & 10° insertion angles • 3D trapping occurring at optical powers ranging between ≈50 -600 mW • Tip # 96 trapping focal point beyond fibre end Start Frame End Frame
Change in trap Dynamics • At 10° insertion angle the introduction of a trapping range was observed • Particles within the range are trapped and repelled if beyond • The trapping range is tuneable, varying with tip profile • Ranges recorded between 6-13 µm
Experiment 1 Force Determination • Dynamic measurement method • Particle trapped, laser deactivated • Fibre tip moved in (–ve) x direction, Laser reactivated • High speed video records the particles position, as it is drawn into the trap • Repeated for various laser outputs, tips and insertion angles • Characterise the trap as a function of the optical power with respect to the trapping force
Experiment 2 Optical Force Field Mapping • Particles trapped from various points about the fibre tip • Knowing the optical trapping force for each trajectory will allow the mapping of the optical force field distribution • Providing information such as focal point, beam spot size, beam waist position and divergence angle
Particle Tracking • Particles trajectory is tracked using particle tracking image processing package developed in the IDL platform • Provides particle co-ordinate data in both pixel and µm formats • Allows the origin to be set at the fibre end
Force Determination • Trapping force calculated using the stokes equation and Newton's second law • Calculated from the first and second derivatives of the particles position as a function of time • Inertia force can be ignored due to the Reynolds number (Re)<< 1 • Fopt = Trapping force • η = Viscosity of the medium • r = Radius of the particle • S =Particles position • m = Mass of particle • Derivative of the particles position/time = acceleration • Second derivative of the particle position/time = velocity • Re = Reynolds number • ρ = Density of the medium • V = Maximum velocity • D = Particle diameter • η = Viscosity f the medium
Conclusion • Project Aims • Optical Trapping Forces • Basic Optical Trapping Theory • Differences Classical and Fibre Based Optical Traps • Low Insertion Angle Hurdles and Solutions • Novel Trap Dynamics Observation • Experimental Procedures • Particle Tracking & Force determination • Discussion of Initial Results
Thank You Any Questions?