Download

1 / 16
160 likes | 296 Views
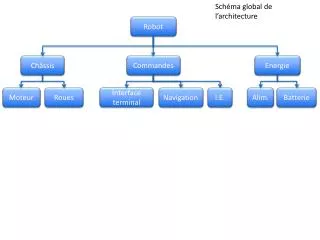
Palm Pilot Robot Kit. Projekt inżynierski „Rozbudowa funkcjonalności robota mobilnego PPRK”. Plan. Wstęp Architektura Realizacja Podsumowanie. Wstęp. Promotorzy dr hab. inż. Krzysztof Krawiec dr inż. Piotr Zielniewicz. Wstęp. Trudny i ograniczony język TEA Sztuczna inteligencja.

E N D
Palm Pilot Robot Kit Projekt inżynierski „Rozbudowa funkcjonalności robota mobilnego PPRK”
Plan • Wstęp • Architektura • Realizacja • Podsumowanie
Wstęp • Promotorzy • dr hab. inż. Krzysztof Krawiec • dr inż. Piotr Zielniewicz
Wstęp • Trudny i ograniczony język TEA • Sztuczna inteligencja
Architektura • Moduł GP • 40 MHz RISC processor • przechowanie do 11 programów TEA • równoległa obsługa do 4 wątków TEA • architektura reflexów • wykonanie 9000 instrukcji na sekundę • dostęp do urządzeń I/O przez zestaw komend
Architektura • Tryby kontroli • Slave • bezpośredni dostęp komputera do I/O robota • Reflex • komenda/wejscie wyzwala inną komendę lub serię komend • TEA • małe programy maszyny wirtualnej architektury BrainStem
Architektura • TEA • moduły ograniczone do 1kB • równolegle wykonanie do 4 wątków • możliwość wykonywania podprogramów (przekroczenie limitu 1kB)
Architektura • Współpraca z innymi platformami • biblioteki Javy, C, C++, C# • tryb heartbeat – okresowe przesyłanie statusu robota do hosta
Realizacja • GUI + debugger (Java)
Realizacja • JGraph
Realizacja • Controller (C#)
Realizacja -Implementacja w środowisku .NET -Komunikacja bezpośrednia za pomocą portu szeregowego -Stan robota reprezentowany grafem stanów, zmiany stanów (tranzycje) zachodzące pod wpływem komunikatów (Message) . -w systemie jest wiele równolegle działających grafów stanów
Realizacja • Zagnieżdżone grafy stanów • System może działać z każdym robotem po podmienieniu klas Sender i Receiver • Zaawansowany system logowania zdarzeń
Realizacja • XML • Akcje • Sensory • Aktuatory • Grafy stanów • Stany • Tranzycje
Podsumowanie • Tani • Wiele dodatkowych elementów • Kompas • Kamera • Inne czujniki • Trudny język
Pyrania • Dziękuję za uwagę