Download
1 / 5
60 likes | 219 Views
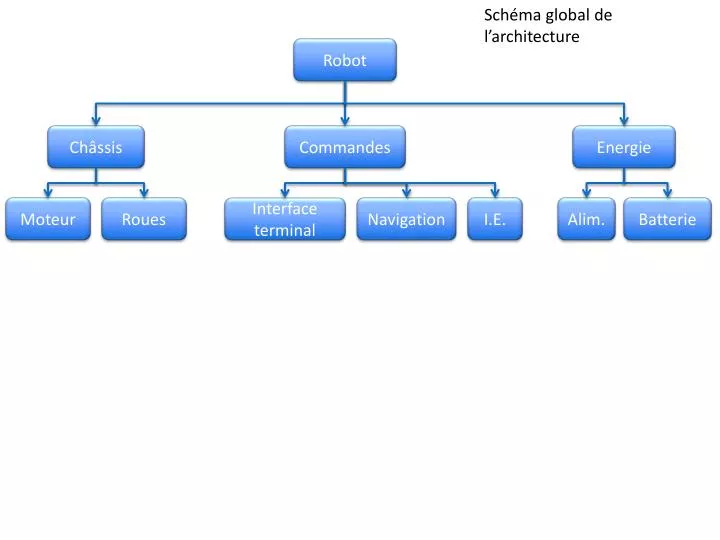
Schéma global de l’architecture. Robot. Energie. Châssis. Commandes. Moteur. Roues. Interface terminal. Navigation. I.E. Alim. Batterie. Châssis. Moteur. 4*Roues. Commandes. Navigation. Interface terminal. Intelligence embarquée. PC/ iPhone. Sans fils. Localisation relative.

E N D
Schéma global de l’architecture Robot Energie Châssis Commandes Moteur Roues Interface terminal Navigation I.E. Alim. Batterie
Châssis Moteur 4*Roues
Commandes Navigation Interface terminal Intelligence embarquée PC/iPhone Sans fils Localisation relative Trajet (PCC?) Obstacles FPGA uC (PIC) Mapping Infra rouge Ultrason Demo Board
Energie Alim. Batterie Convertisseur DC/DC NiMh NiCd LiPo LiIon U235
Identification des tâches • Construire le chassis • 4 roues, 2 motrices séparées (rotation), 2 non motrices • Programmation du PIC/FPGA • Asservissement moteur • Acquisition du télémètre/photodiode • Gestion de la position