Download
1 / 11
110 likes | 193 Views
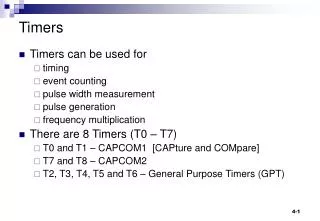
Timers in Coldfire Processor. Computer Science & Engineering Department Arizona State University Tempe, AZ 85287 Dr. Yann-Hang Lee yhlee@asu.edu (480) 727-7507. General Purpose Timer. The basic unit – counter (up or down) a clock source generate timing events (interrupts or timer output)

E N D
Timers in Coldfire Processor Computer Science & Engineering DepartmentArizona State University Tempe, AZ 85287 Dr. Yann-Hang Leeyhlee@asu.edu(480) 727-7507
General Purpose Timer • The basic unit – counter (up or down) • a clock source • generate timing events (interrupts or timer output) • if overflow or reach 0 • if match with a preset value • measure time – read counter values (captured) • free running, reset or reload, compare clock (external or internal) binary counter control circuit
clock binary counter load event interrupt or ready flag edge detection input capture register Measurement • Input-capture : identify the moment that an event occurs • latch the counter value when triggered • CPU can read the value later • Output compare : control the timing of output bit • CPU sets a value in output compare register • compare with counter every clock cycle • if equal, send an output signal • External event counting • Measuring elapsed time, pulse width, frequency, and period
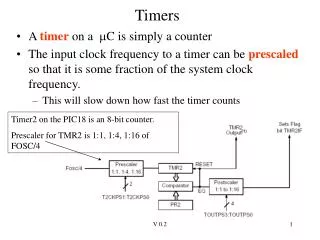
Hardware Timer • Typical approach – • hardware unit generates an interrupt per unit of time (e.g. millisecond) • Avoid overflow with a software counter (in memory) – incremented when interrupts • assume the input clock of 2MHz (0.5x10-3 ms) • set a compare counter to 1999 • start counting with the input clock and, when equals to the compare register • interrupt • restart the counter from 0 interrupt or toggle output = binary counter input clock (2MHz) restart compare register (1999)
Delay Function using DMA Timer • Initialize a timer and input frequency • Set up a compare value • Check for flag or wait for interrupt
DMA Timer • Control and status registers • mode register: #define MCF_DTIM3_DTMR *(vuint16*)(&__IPSBAR[0x0004C0])) • extended mode register • event register • reference register: for comparison • capture register: save counter value on capture event • counter register: counting
Fucntion cpu_pause void cpu_pause_m(int usecs) { /* Enable the DMA Timer 3 */ MCF_DTIM3_DTRR = (usecs - 1); MCF_DTIM3_DTER = MCF_DTIM_DTER_REF; // 0x02 MCF_DTIM3_DTMR = 0 | MCF_DTIM_DTMR_PS(sys_clk_khz / 1000) | MCF_DTIM_DTMR_ORRI // 0x0010 | MCF_DTIM_DTMR_FRR // 0x0008 | MCF_DTIM_DTMR_CLK_DIV1 // 0x0002 | MCF_DTIM_DTMR_RST; // 0x0001 while ((MCF_DTIM3_DTER & MCF_DTIM_DTER_REF) == 0) {}; /* Disable the timer */ MCF_DTIM3_DTMR = 0; }
capture count1 capture count2 Pulse Width Measurement • Capture counter values on edges • Read the difference to know the width • (count2-count1)/(timer frequency) • If the pulse is much longer, counter may overflow • interrupts on overflows • use software counter to count number of overflows.
Waveform Generator • Duty cycle : (pulse duration)/(clock period) • 50% -- square wave • Free-running or reset on compare event • Use DMA timer to generate a square wave of 1KHz based on an input clock is 40MHz— • Pin assignment of DMA timer 0 • Toggle output every 500ms • Mode register: CE, OM, ORPI, FRR, CLK, RST • Reference register: DTRR • 500ms = 1/40MHz * (prescale+1) * (DTRR+1)
PWM in 5211 • 4 PWM outputs • 8 channels • Counter (8 bits) • Period/duty • Even+odd channels 16 bit pwm • 4 clock sources • A, SA, B, SB
PWM in 5211 • Initialization MCF_GPIO_PTAPAR = 0 | MCF_GPIO_PTAPAR_PTAPAR0(3); MCF_PWM_PWMPOL = 0 | MCF_PWM_PWMPOL_PPOL1; MCF_PWM_PWMCLK = 0|MCF_PWM_PWMCLK_PCLK1; MCF_PWM_PWMPRCLK = PRE_SCALE; MCF_PWM_PWMSCLA = SCALE; MCF_PWM_PWMPER1 = 255; • Set duty cycle MCF_PWM_PWMDTY(channel) = duty_cycle; • Enable pwm MCF_PWM_PWME = 0|MCF_PWM_PWME_PWME1