Download
1 / 13
130 likes | 152 Views
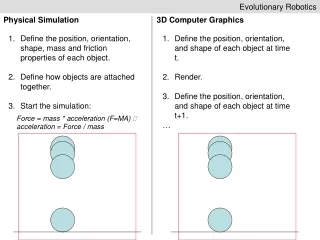
Evolutionary Robotics. First attempt to evolve robot morphology and control. Sims, K. (1994) Evolving 3D Morphology And Behavior by Competition. Artificial Life IV , 28-39. Evolutionary Robotics. First attempt to evolve robot morphology and control. Evolution performed on

E N D
Evolutionary Robotics First attempt to evolve robot morphology and control Sims, K. (1994) Evolving 3D Morphology And Behavior by Competition. ArtificialLife IV, 28-39.
Evolutionary Robotics First attempt to evolve robot morphology and control Evolution performed on Connection Machine-5: 32 processors connected in hypercube topology. Population size = 300 # of generations = 100 ~ 3 hours for a typical run Sims, K. (1994) Evolving 3D Morphology And Behavior by Competition. ArtificialLife IV, 28-39.
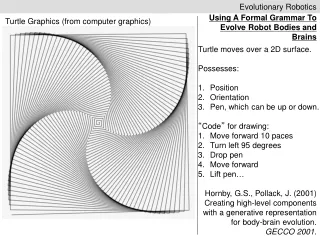
Evolutionary Robotics First attempt to evolve robot morphology and control Genotypes: Phenotypes: Genotype-to-phenotype mapping: Sims, K. (1994) Evolving 3D Morphology And Behavior by Competition. Artificial Life IV, 28-39.
Evolutionary Robotics First attempt to evolve robot morphology and control Genotype: Node labels: body part dimensions joint-type: hinge, ball/socket… joint-limits recursive-limit (RL): if ( RL>0 ): RL = RL-1 follow all outgoing edges. Edge labels: change in position change in orientation change in scale reflection terminal-only flag (TO): if ( TO==true && parent->RL==0 ): follow edge;
Evolutionary Robotics First attempt to evolve robot morphology and control 2 3 1 Genotype: Node labels: body part dimensions joint-type: hinge, ball/socket… joint-limits recursive-limit (RL): if ( RL>0 ): RL = RL-1 follow all outgoing edges. Edge labels: position orientation scale reflection terminal-only flag (TO): if ( TO==true && parent->RL==0 ): follow edge; 5 6 4 8 9 7 11 12 10
Evolutionary Robotics First attempt to evolve robot morphology and control Sims, K. (1994) Evolving 3D Morphology And Behavior by Competition. ArtificialLife IV, 28-39.
Evolutionary Robotics First attempt to evolve robot morphology and control Non-local “Brain” Genotypes: Nested, directed, multigraphs: Each graph node contains another graph. Embedded graph describes the local neural circuitry for that body part. JX = joint sensor CX = contact sensor PX = photosensor EX = effector (X=degree-of-freedom)
Evolutionary Robotics First attempt to evolve robot morphology and control Non-local “Brain” Neurons: Sum Product Divide Sum-threshold Greater-than Sign-of, Min, Max, Abs, If, Interpolate (itp) Sin, cos, atan, Log, Expt, Sigmoid, Integrate, Differentiate, Smooth, Memory Oscillate-wave (wav) Oscillate-saw (saw).
Evolutionary Robotics First attempt to evolve robot morphology and control Genotypes: Nested, directed, multigraphs: Each graph node contains another graph. Embedded graph describes the local neural circuitry for that body part. JX = joint sensor CX = contact sensor PX = photosensor EX = effector (X=degree-of-freedom) Sims, K. (1994) Evolving 3D Morphology And Behavior by Competition. ArtificialLife IV, 28-39.
Evolutionary Robotics First attempt to evolve robot morphology and control Sims, K. (1994) Evolving 3D Morphology And Behavior by Competition. ArtificialLife IV, 28-39.
Evolutionary Robotics First attempt to evolve robot morphology and control Two robots compete: Sims, K. (1994) Evolving 3D Morphology And Behavior by Competition. ArtificialLife IV, 28-39.
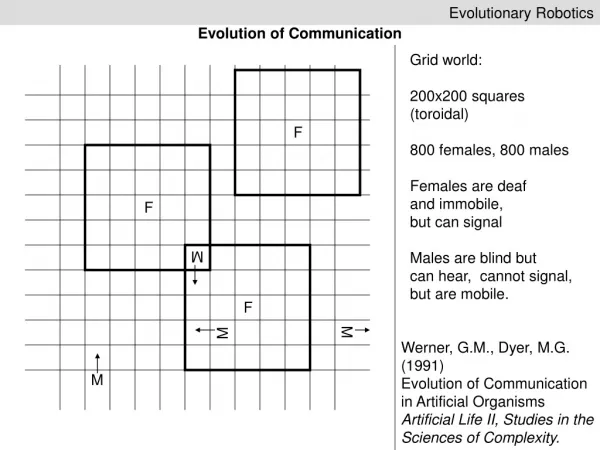
First attempt to evolve robot morphology and control Robots can compete within a single species (a-d), or robots can compete between species (e-g) What is the disadvantage of ‘all-vs-all’, ‘random’, and ‘tournament’? Sims, K. (1994) Evolving 3D Morphology And Behavior by Competition. ArtificialLife IV, 28-39.
First attempt to evolve robot morphology and control Results from four evolutionary runs. Grey line: Average fitness of species 1; Black line: Average fitness of species 2. Sims, K. (1994) Evolving 3D Morphology And Behavior by Competition. ArtificialLife IV, 28-39.