Download
1 / 57
570 likes | 605 Views
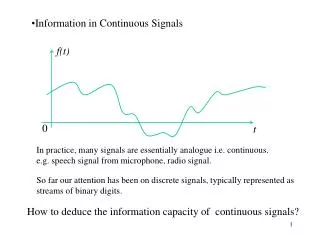
The sampling of continuous-time signals is an important topic. It is required by many important technologies such as:. Digital Communication Systems ( Wireless Mobile Phones, Digital TV (Coming) , Digital Radio etc ). CD and DVD.

E N D
The sampling of continuous-time signals is an important topic It is required by many important technologies such as: Digital Communication Systems ( Wireless Mobile Phones, Digital TV (Coming) , Digital Radio etc ) CD and DVD Digital Photos
Switch close and open Periodically with period Ts Analog or continues level Discrete Level If you have 8 levels you will need 3 bits If you have 16 levels you will need 4 bits
Fourier Transform of periodical signal Generating function
Let Ideal Sampling in time Maximum Frequency in F(w)
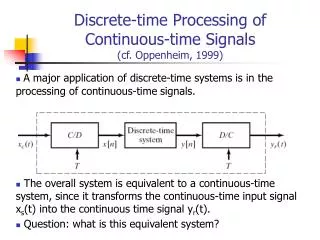
Ideal Sampling in time Question : How to recover the original signal f(t) ↔F(w) from the sampled Fs(w)
Question : How to recover the original continuous signal f(t) ↔F(w) from the sampled fs(t) ↔ Fs(w) Ideal Sampling in time If I can recover this in frequency Ideal Sampling in time With a constant correction A/Ts → A I can Fourier inverse back to recover the original continuous signal f(t) If I use ideal low pass filterI will be able to extract this
If the bandwidth of the ideal low pass filteris greater than We will get distorted shape Therefore the ideal low pass filter bandwidth should be When we inverse back we will not get the original signal f(t)
Ideal Sampling in time Ideal Sampling in time Now what will happened if you lowered the sampling frequency The frequencies from adjacent part of the spectrum will interfere with each other مستعار We get distortion Aliasing
http://www.youtube.com/watch?v=jHS9JGkEOmA http://www.youtube.com/watch?v=pVcuntWruuY&feature=related
Therefore to avoid aliasing and recover the original signal the sampling should be such that Therefore Nyquist proposed the following The Sampling Theorem The sampling rate (ws) must be at least twice the highest frequency (wB) component present in the sample in order to reconstruct the original signal.
If we sampled using train of pulses rather than impulses Practical non ideal sampling Discrete Level Discrete Time We still can recover the original continuous signal f(t) ↔F(w) from the sampled fs(t) ↔ Fs(w)
Switch close and open Periodically with period Ts Analog or continues level Discrete Level We know have the following definition Therefore we will have a sequence of numbers Next we develop the mathematics for discrete signals
The shifted unit impulse function is defined by Note that the discrete-time impulse function is well behaved mathematically and presents none of the problems of the continuous time impulse function
The discrete-time unit impulse function can be expressed as the difference of two step functions
10 Discrete-Time Linear Time-Invariant Systems Recall from the continuous case
An equation relating the outputof a discrete LTI system to itsinputwill now be developed Linear –Time Invariant Recall from the continuous case Impulse response Impulse Input Shifted Impulse Input Shifted Impulse Response Multiply by the response by the same constant Multiply by constant
Now relating the outputof a discrete LTI system to itsinputwill now be developed Multiply each side by x[k]
(Discrete Convolution) Let the input to a discrete-time system and the unit impulse response
Recall that a memory less (static) system is one whose current value of output depends on only the current value of input. A system with memory is called a dynamic system Recall from the continuous case
A discrete-time LTI system is causal if the current value of the output depends on only the current value and past values of the input Recall from the continuous case
( )
Theunilateral Z-Transform of the Sequence samples x(nT) ≡ x[n] defined by The coefficient x[n] denotes the sample values and z-ndenote the sample occurs n sample periods after t = 0 However similar to Laplace we will not evaluate this complex integration we will Z-Transform of known tabulated sequences
Define the unite impulse sequence by , Note : the unit impulse here (the discrete) is different from the impulse d(t) Laplace Z
Z- Transform Properties (1) Linearity Z- Transform is Linear operator Then Proof
We want the z-Transform of cos(bn) Entry on the Table 11.2 Similarly
Let the input to a discrete-time system and the unit impulse response Using the same procedures we used in Fourier Transform and Laplace Transform we get The transfer function