Download
1 / 202
2.1k likes | 2.81k Views
Mechanics. For audience from foreign students. Physics. The science of the simplest and the most common matter motion forms and their relative transformations. The science that studies the general properties and the laws of substance and field movements.

E N D
Mechanics. For audience from foreign students
Physics The science of the simplest and the most common matter motion forms and their relative transformations The science that studies the general properties and the laws of substance and field movements The simplest matter motion forms are present in all the most complex forms of it A substance and a field are forms of the matter
The matter • The world around us, all that exist around us and revealed by us per sensations • The motion is an essential matter property and its existence form • The motionis various matter changes: from the simple transfer to the most complex mentality processes
Physical Foundation of mechanics Kinematics Basis
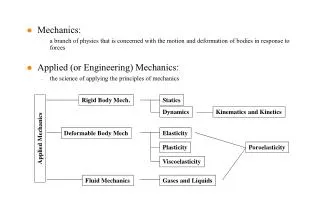
The mechanics Part of physics, which studies the motion laws and reasons that cause or change this motion Quantum mechanics Classical Relativistic Studies the motion laws of macroscopic bodies. Their velocities are smaller then speed of light Studies the motion laws of microscopic bodies – single atoms and elementary particles Studies the motion laws of macroscopic bodies with velocities that are comparable with the speed of light
The branches of mechanics • Kinematics Studies the objects movement without the causes that lead to this movements • Dynamics Studies the motion laws and causes that induce and change this motion • Statics Studies equilibrium laws of bodies system If the motion laws are known, then the equilibrium laws could be established ! !
Physical models in mechanics • Physical modelsare used in mechanics for describing bodies motion. This model depends on specific tasks terms • Mass pointis a body having a mass the size of which can be disregarded in this task. It is an abstract concept • Mass point system.Random macroscopic object or bodies system can be represented as a mass point system. In this system mass points interact among themselves.
Physical models in mechanics • A perfectly rigid body Is a body, that can not become deformed at any terms. The distance between two particles of that body remains constant at any terms. • A perfectly elastic body Body deformation obeys the Hooke’s law. Afterthe termination of external forces the body takes its original size and form. • A perfectly inelastic body Body keeps strain state after termination of external forces.
Mechanical motion Base, or frame z • An indication body The position of moving body is determined relative to randomly selected body (indication body). • Coordinate system Is a system associated with an indication body. • Base, or frame Is a combination of the indication body, the coordinate system and the clock synchronized among themselves. r z 0 x y x y Cartesian coordinate system xyz
Mechanical motion Kinematic equation of mass point movement x=x(t) y=y(t) z=z(t) or r = r (t) z r z 0 x y x y The position of mass point Аat frame is described by three coordinates x, y, zor radius-vector r. When mass point moves, its coordinates change within time (t). So this movement is described by the scalar equation system or the equivalent vector equation.
Trajectory • Trajectory is a line describing by moving mass point (body) relative to selected base. • Depending on trajectory form there are several motion types: • Rectilinear, or straight-line • Curvilinear • Circular motion and etc. The trajectory form depends on a mass point motion character and a base. ! !
Path length and displacement vector z Displacement vector It is a vector from the start position of the moving point to its position at this moment. A r1 ∆r B r2 0 x Path length It is a length of path AB passed by mass point at a given period of time. y ∆s=s(t) – a scalar time function.
Forward motion A’ A A’’ C’ • It is a motion, when some straight line, inflexibly connected with a moving body and drown between two random points, stays parallel to itself. • In this case all body points are moving equally. Thus, the forward motion of this body can be characterized by the motion of some random body point (e.g., by body mass center motion) C’’ C B’ B B’’
Rotatory motion O • It is a motion, when all body points are moving in circles, which centers are lying on the equal straight line called axis of rotation. • The different body points are moving differently, that is why, its rotatory motion cannot be characterized by a motion of any point. O’
Velocity • A velocityis a vector quantity that determines, from one hand, the motion speed and from other hand, its direction at a given period of time. • A mean velocityis a vector quantity that is determined by ratio of the point radius-vector increment ∆r to the time interval t within which this increment has occurred. ∆s A ∆r v B r1 r2 O The mean velocity vector direction coincides with the direction ∆r
Velocity • One meter per second means the velocity of forward and uniformly moving point, with which this point in 1 second shifts at a distance of 1 meter.
Acceleration • An accelerationis a non-uniform motion characteristic that determines the velocity change rate in absolute value and in direction. • A mean accelerationis a vector quantity that is determined by ratio of velocity change ∆v to the time interval ∆t within which this change occurred. An instant accelerationis a vector quantity that is determined by first derivative of the velocity with time
Components of acceleration • A tangential acceleration characterizes the velocity change rate in absolute value. It is directed along the tangent to trajectory. • A normal acceleration characterizes the velocity change rate in direction. It is directed to the trajectory curvaturecenter. an a aτ v
The full acceleration in curvilinear motion Geometric sum of the tangential and normal acceleration component The full acceleration absolute value The unit of acceleration
Illustration of different motion types Uniform and uniformly accelerated motion
Uniform motion (v = v0 = const) Velocity v s v0 Acceleration s s0 0 t 0 t s Passed way 0 t
Uniformly accelerated motion (a = const) a Acceleration a v 0 t v Velocity v s 0 t
Uniformly accelerated motion (a = const) s Passed way 0 t s s0 0 t
Free fall • It is a motion that body would commit only by gravity without air resistance. • If body free falls from low altitude h (h<<R, R – the Earth radius), then it will move with equal acceleration g, which directs straight down. • g = 9.81 m/s2. It is free fall acceleration.
Kinematic equation of motion • The common vector equation, that determines a body motion with equal acceleration g and initial velocity v0from the point r0, can be presented as follow:
Projection of kinematic equation on the axis y • The axis directs straight down. The indication point is put at the motion beginning point. t0 = 0 0 g y
Free fall • The path passed by body in free fall at the moment t. Free fall without initial velocity Free fall currency Velocity
Motion of body thrown straight up • The body moves straight up with initial speed v0. • Without air resistance body acceleration a in any motion period of time is equal to free fall acceleration g (a = g). • To the highest rise point the motion is uniformly decelerating, and, after, this is a free fall without initial velocity.
Kinematic equations • The common vector equation, that describes a body motion with equal acceleration g and initial velocity v0from the point r0, can be presented as follow:
Projection of kinematic equation on the axis y • The axis directs straight up. The indication point is put at the motion beginning point. t0 = 0 y vt1=0 h v0 0 v
Motion of body thrown straight up Rise time Height of lift, or lift
Motion of body thrown straight up The common time of motion Time of falling
Motion of body thrown straight up Finite velocity of motion The finite motion velocity in absolute value is equal to the initial velocity. The “minus” means that the finite motion velocity is directed against an axis y, i.e. straight down.
Elementary rotation angle • Elementary, or infinitesimal, turns are considered as vectors. • An absolute value of vector dφ is equal to the rotation angle. Its direction coincides with forward motion direction of screw edge. • Screw head goes round in point motion direction in a circle. In other words, it obeys the rule of the right screws. dφ ∆φ 0
Angular velocity ω Vector ωis directed along the rotation axis according to the rule of the right screws. dφ v v 0 R 0 R v 0 ω R An angular velocity is a vector quantity that is determined by the first derivative of the body rotation angle with time. dφ ω v 0 R ω
Connection between linear and angular velocity Absolute value dφ ∆φ 0 ∆s
Connection between linear and angular velocity Vector Vector product coincides with vector v direction. Its absolute value can be presented as: ω R v α r 0
Unit of angular velocity Dummy vector, or pseudovector • 1 radian per second is an angular velocity of an uniformly revolving body. All its points in 1 second turn relative to the axis on angle by 1 radian. • It is a vector whose directions are connected with rotation direction. In this case this vectors can be delayed from any point on the rotation axis.
Uniform motion of mass point in a circle • It is a motion when a mass point, or body, passes equal circular arc lengths within equal time periods. • An angular velocity:
Rotation period T Rotation frequency • Rotation period is equal to the time when a mass point commits the full cycle in a circle, i.e. the mass point turns by angle 2π. • Rotation frequency is equal to the number of turns that a mass point commits in one second.
Peculiarity of uniform motion in a circle v • Uniform motion in a circle is a special case of curvilinear motion. • A mass point moves with velocity that is constant in absolute value. • But the direction changes during time. • Thus, the motion is accelerated. v an an 0 an R v
Acceleration v • Normal acceleration component is directed along the radius to the circle centre and perpendicularly to the velocity vector. • A mass point acceleration in any point of the circle is centripetal. v an an 0 an R v
Angular acceleration • An angular acceleration is a vector quantity that is determined by first derivative of a angular velocity with time. An angular acceleration vector is dummy vector. ω2 ω2 ω1 ε ω1 0 0 ε
Angular acceleration • 1 radian per second squared is equal to angular acceleration of uniformly rotating body, that changes angular acceleration on 1 radian per second within 1 second.
Dynamics bases of forward motion Inertial frames. Mass and pulse. Force
Newton’s first law • Every object in a state of uniform motion tends to remain in that state of motion unless an external force is applied to it. • There are such frames for which forward moving bodies save their velocity constant, unless another bodies act on them. • Newton’s first law content composes statement about inertial frames existence. Sir Isaac Newton 1642-1727
Newton’s first law • Inertial frame is a frame for which a mass point, free from external impacts, stays at rest or moves straight and uniform. • Noninertial frame is a frame that moves with acceleration relative to inertial frame. • It was empirically established that the heliocentric frame could be considered as inertial system.