Download
1 / 38
380 likes | 395 Views
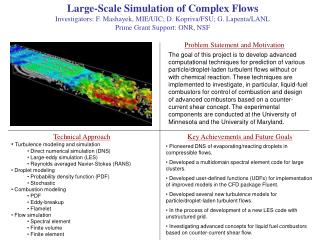
Explore the futuristic vision of UAS traffic management, dynamic UAV flight path planning in urban environments, using BRECCIA agents for optimal policies in complex scenarios. The system includes components like BDI Engine, Hadoop GeoWave Connector, and specialized functions for real-time decision-making. Discover the state transition, reward function, and value iteration algorithm. Advances in mapping, delivery, inspections, and urban air mobility are discussed. Learn more about UAS fleet and large-scale simulations at ICPS 2019.

E N D
Optimal Policies in Complex Large-scale UASTraffic Management David Sacharny & Tom Henderson ICPS Taipei, Taiwan 7 May 2019 ICPS 2019
Futuristic Vision (Slide from Jared Esselman; UDOT) ICPS 2019
Commercial Use Cases • 3D Mapping, Video Collection • Delivery (Amazon, etc.) • Inspections • Data (Re)Transmission • Air Taxis • Investment 2017: $506M • 1000’s of flights per day ICPS 2019
Drone HW Investment ($B) ICPS 2019
Utah Urban Air Mobility Idea (Slide from Jared Esselman; UDOT) ICPS 2019
UDOT UAM (cont’d) (Slide from Jared Esselman; UDOT) ICPS 2019
UDOT UAM (cont’d) Proposal: Airwaysabove roadways. ICPS 2019
UAM: Need to Plan Flights ICPS 2019
Geospatial Intelligence:BRECCIA ICPS 2019
BRECCIA ICPS 2019
URBAN Implementation BRECCIA Agent • The BRECCIA Agent represents the core abstraction for all agents in the system. • Agents are distributed across specialized machines such as UAVs, mobile laptops, or high performance computers. • The inherited components of each BRECCIA agent enable an overall system that is dynamic and data-driven. BDI Engine :Mission Planner Uncertainty Reduct. Goal DB P.L. Logic Module Hadoop GeoWave Connector RRT* Planner Accumulo Specialized Functions GeoServer :Weather Monitor :UAV Manager :User Example Instantiations of the BRECCIA Agent ICPS 2019
Which Path To Take? What about Wind? What about Rain? ICPS 2019
Airway Corridors E.g., over Salt Lake City
Airspace Volumes Z Y -X X -Y -Z (b) Action Directions (a) Airspace Volumes
Learning Optimal Action Policy 4x4 Grid ICPS 2019
Bellman Equations where: U(s) is the utility of state s a is an action A(s) is the set of actions in state s R(s) is the reward for state s is a horizon coefficient ICPS 2019
State Representation state space: * 3 integer grid coordinates * 3 wind vector values (x,y,z) * 1 precipitation value * 1 temperature value ICPS 2019
State Representation:Reduced state space: * G = {1,2,3,4}: grid indexes * W = {0,1}: no wind; wind * P = {0,1}: no rain; rain * T = {0,1,2}: cold, normal, hot (temp) ICPS 2019
Actions A = {X, -X, Y, -Y, Z, -Z} * move in one of the coordinate directions ICPS 2019
Probabilistic State Transition ICPS 2019
Reward Function ICPS 2019
Value Iteration Algorithm From: Russell & Norvig ICPS 2019
Experiments • Start Location: 1,1,1 (index 1) • Goal Location: 4,4,4 (index 64) • Blocked Cell: 4,4,3 (index 60) • Can’t exit 4x4x4 • Preference for horizontal motion ICPS 2019
State Utilities and Path ICPS 2019
Convergence for Utilities Grid cell [3,4,4] [3,2,4] [2,1,1] ICPS 2019
Optimal Policies X: RIGHT Z: UP Y: BACK ICPS 2019
Optimal Policies ICPS 2019
Cell Travel Density ICPS 2019
Policies with Wind in Y No action in Y axis! No Wind Strong Wind in Y Direction ICPS 2019
Current Work: Get Data! ICPS 2019
Current Work: Testing!Deseret UAS ICPS 2019
Conclusions • Developed effective and efficient optimal policy method • Converted core BRECCIA system to work for UAS Traffic Management • allows communicating, autonomous agents • Cloud computing ICPS 2019
Current Development ICPS 2019
Large-scale Simulation • http://www.cs.utah.edu/~cem/uav/
Questions? ICPS 2019
UTAH UAV Fleet ICPS 2019
Acknowledgment This material is based upon work supported by the Air Force Office of Scientific Research under award number FA9550-17-1-0077 (DDDAS-based Geospatial Intelligence) ICPS 2019