Download
1 / 70
740 likes | 919 Views
Active Interrogation of Helicopter Rotor Faults Using Trailing Edge Flap Actuation. Patricia Stevens Doctoral Candidate Mechanical Engineering Penn State University Doctoral Dissertation Defense April 2, 2001. Outline. Background & Motivation Objectives of Work Modeling Approach

E N D
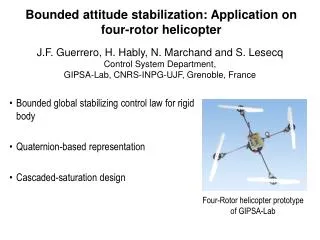
Active Interrogation of Helicopter Rotor Faults UsingTrailing Edge Flap Actuation Patricia Stevens Doctoral Candidate Mechanical Engineering Penn State University Doctoral Dissertation Defense April 2, 2001
Outline Background & Motivation Objectives of Work Modeling Approach Damage Identification Conclusions
Documented Rotor System Problems • Civil • 1990-1996: 35 civil rotorcraft accidents were caused by rotor system failures • AH-64 Apache - Early Blade Problems • Original aluminum blades pitted by sand and disabled by hail • Composite blades suffered from delamination • CH-46 Sea Knight - Prior to Upgrade • Inspections as often as every 8 hours of flight time for some rotor components
What makes helicopter rotor damage detection so difficult? AerodynamicLoads Complex Components InaccessibleLocations GyroscopicSystem CentrifugalStiffening Noisy Environment
Previous work:Localized fault detection Ultrasonicsensor • Acoustic EmissionSchoess et al. (1997) • Passive Approach • Acoustic Emission sensor “listens” for crack propagation • Wave Mechanics Lakshamanan & Pines (1997) & Purekar et al. (1998) • Active approach • Scattering of structural waves due to impedancechanges • Limitation: • Requires a priori knowledge of fault location crack stress waves Acoustic Emission PZTactuator / sensor flaw scattered waves Wave Mechanics
Previous work:Rotor Diagnostics using Fuselage Measurements • Azzam & Andrew (1992, 1995) • Ganguli, Chopra & Haas (1995-98) • Passive generation of fixed frame loads • Measurements • relative blade position • fuselage vibration • Measurements in hover and forward flight • Limitations: • Limited detectability of small faults • Neural net required to classify faults • Forward flight condition measurements required Dissimilarblade model Seed fault Simulateresponse Fault profileat eachflightcondition Measuretip displacementhub loads (vibs) Next flightcondition TrainNeural Net Next fault
Previous work:Application of Structural Damage Detection Kiddy & Pines (1997 - 1999) • Applied Modal Based SDD Technique to rotor blade environment • Modified Eigenstructure Assignment Technique to accommodate • Centrifugal Stiffening • Aerodynamic Damping • Limitations • Sensitive to noise • Limited fault coverage • Measurability & actuation not assessed Will an active interrogation structural damagedetection approach yield improved results?
Next Generation Rotorcraft… Active Trailing Edge Flaps • Installed for vibration and noise control • Potential actuator for damage interrogation MD 900 blade with trailing edge flap Flap Actuator Tab Actuator Active Control Flap, Noise and Vibration Composite Blade Assembly Trim Tab, In-Flight Tracking HH10 Airfoil Section Flap Actuator Bearingless Hub Tab Actuator BLADE CROSS-SECTION
Interrogation signal sensors trailing-edge flap Blade Response Measured Damage Evaluation Algorithms Goal: Design and Evaluate the Active Interrogation Concept
Objectives • Determine if active interrogation of rotor faults using trailing edge flap actuators is a viable concept. • Develop active interrogation techniques appropriate for the rotor blade environment. • Demonstrate effective damage evaluation in hover. • Demonstrate damage evaluation in the presence of noise and modeling errors • Evaluate limitations of the approach.
Outline Background & Motivation Objectives of Work Modeling Approach Rotor Trailing Edge Flap Damage Damage Identification Conclusions
Rotor Model - Bearingless Main Rotor • Finite Element Approach • Flap, torsion • 10 beam elements • Hingeless rotor - cantilever boundary condition Pitch LinkStiffness Flexbeam • Dissimilar blades • Aeroelastic rotor in hover • Response via time integration • Response measured at each node Nel = 10 f Nodal Degreesof Freedom W Cantileverboundarycondition
Trailing-Edge Flap Model d • Physical Description • Size 10% of rotor radius • Location 80-90% rotor radius • Frequency 0 - 50 Hz. • Amplitude up to +/- 5 deg • (using +/- 2.5 deg) • Lift 120 lb/deg at 0 Hz • 70 lb/deg at 50 Hz • Moment 25 ft-lb/deg • Aerodynamic Environment • Mach No. 0.45 - 0.6 in hover • Reduced Frequency up to 0.5(k=wc/2V) • Requires subsonic compressible flow unsteady aerodynamic model(Leishman, et al)
Damage Models • Flexbeam Degradation • Bending Stiffness • Torsional Stiffness • Control System Stiffness • Flexbeam Crack • Outboard Stiffness Defect • Bending • Torsional • Outboard Crack • Ballistic Damage • Trim Mass
Flexbeam Degradation • Distributed stiffness fault • Change in EI or GJ over flexbeam element • 5% reduction in EI or GJ for 0.0-0.1R (flexbeam element)
Control System Stiffness • Crack in pitch rod or fatiguefailure in connecting hardware • 5% reduction in axial stiffness of pitch rod • 5% effective reduction in torsional spring at end of flexbeam
Outboard Stiffness Defect • Adopted from Ganguli, Chopra and Haas (1995-98) • Manufacturing Defect • Delamination • 5% reduction in EI or GJ for 0.6-0.7R
Ballistic Damage • Experimental study of effects ofballistic damage (Robinson & Leishman, 97-98) • Ballistic damage affects: • Cla, Clmax, Cd • aerodynamic center location • mass • “In some cases significant damage produced surprisingly mild effect on the aerodynamics” • “Mild decreases in lift, but major increases in drag” • Ballistic Damage = 5% decrease in mass from 0.6-0.7R
mass nominal mass Loss of Trim Mass • Discrete change in mass of 0.6 lb at 95% radius x/Lel feather axis TrimMass Lel
Crack Model - a new finite elementKrawczuk et al. (2000) A CRACK Boundary Conditions I II H a LB A L w1(x) w2 (x) q1 q3 cb=1/kb q2 q4 f1 (x) f2 (x) I II x=0 x=LB x=LB x=L From moment equilibrium
Crack Model - a new finite element • Converges to standard beam element as K 0 • Only bending slope terms are affected LB=L/2 Krawczuk et al. (2000)
Elastic Crack Model - Relating Crack Depth to Crack Constant Effect of depth on crack constant • Correction function, F(a/H), takes into account crack and body geometry (from stress intensity factor): • Correction function governs flexibility(elastic crack) • Flexibility determines constant, K K/H a/H
Crack Model - Validation [reproduced from Krawczuk et al. (2000)]
Outline Background & Motivation Objectives of Work Modeling Approach Damage Identification Theory & Results Effect of Modeling Errors Noise & Noise Mitigation Alternate Extent Quantification Approach Measurability Conclusions
Structural Damage Detection Background (Modified from Rytter, 1993) Four Levels of Damage Identification • Level 1: Detection • Level 2a: Level 1 + Location • Level 2b: Level 1 + Characterization • Level 3: Level 2 + Quantification of Severity • Level 4: Level 3 + Prediction of Remaining Life Can I safely completemy mission? Can I safely completemy mission?
Structural Damage Detection Background Four Levels of Damage Identification • Level 1: Detection • Level 2a: Level 1 + Location • Level 2b: Level 1 + Characterization • Level 3: Level 2 + Quantification of Severity • Level 4: Level 3 + Prediction of Remaining Life There’s a problem!
Structural Damage Detection Background Four Levels of Damage Identification • Level 1: Detection • Level 2a: Level 1 + Location • Level 2b: Level 1 + Characterization • Level 3: Level 2 + Quantification of Severity • Level 4: Level 3 + Prediction of Remaining Life ...in the pitch link!
Structural Damage Detection Background Four Levels of Damage Identification • Level 1: Detection • Level 2a: Level 1 + Location • Level 2b: Level 1 + Characterization • Level 3: Level 2 + Quantification of Severity • Level 4: Level 3 + Prediction of Remaining Life It’s a crack!
Structural Damage Detection Background Four Levels of Damage Identification • Level 1: Detection • Level 2a: Level 1 + Location • Level 2b: Level 1 + Characterization • Level 3: Level 2 + Quantification of Severity • Level 4: Level 3 + Prediction of Remaining Life It’s a small crack.
Structural Damage Detection Background Four Levels of Damage Identification • Level 1: Detection • Level 2a: Level 1 + Location • Level 2b: Level 1 + Characterization • Level 3: Level 2 + Quantification of Severity • Level 4: Level 3 + Prediction of Remaining Life Safe to complete the mission!
Damage Detection, Location & Characterization The "DAMAGE VECTOR" EOM of damaged system: Damage is perturbation matrix: Rearranging results in two equivalent vector expressions --d(jw) = the Residual Force or “Damage Vector” (1) (2) d(jw) has non-zero elements only at DOFs associated with damage d(jw) can be calculated from known parameters
Interpretation of the Damage Vector Ojalvo & Pilon (1988) Physical interpretation: The harmonic amplitude of nodal forces required to force the healthy system model to respond as if damage were present degrees of freedom: 1,2 3,4 5,6 7,8 9,10 healthy fint d3 d5 d4 d6 measurements: 1,2 3,4 5,6 7,8 9,10 damaged fint
Results for ... • Flexbeam Degradation • Torsional Stiffness • Control System Stiffness • Outboard Stiffness Defect • Bending Stiffness • Outboard Crack • Ballistic Damage • Need to • detect & locate • differentiate between similar faults • Does interrogation frequency affect the results?
50 Hz 10 Hz Damage Vector for Flexbeam Torsional Stiffness displacement w Damage is 5% decrease in GJ of element 1 bendingslope w' mid-nodetwist fM Torsional stiffness damage manifests as damage vector f DOFs connected to damaged element end-nodetwist fA measurement location
50 Hz 10 Hz Damage Vector for Pitch Link Stiffness displacement w Damage is 5% decrease in torsional spring representing pitch link bendingslope w' Pitch link stiffness damage manifests as damage vector f DOF connected to damaged element -- a single DOF mid-nodetwist fM end-nodetwist fA measurement location
50 Hz 10 Hz Damage Vector for Outboard Bending Stiffness displacement w Damage is 5% decrease in EI of element 7 bendingslope w' mid-nodetwist fM Outboard bending stiffness damage manifests as damage vector w & w’ DOFs connected to damaged element end-nodetwist fA measurement location
50 Hz 10 Hz Damage Vector for Outboard Bending Crack displacement w Damage is crack of depth a/H=0.05 at midpoint of element #7 bendingslope w' mid-nodetwist fM Crack damage manifests as damage vector w' DOFs connected to damaged element end-nodetwist fA measurement location
50 Hz 10 Hz Damage Vector for Ballistic Damage displacement w Damage is 5% decrease in mass of element 7 bendingslope w' mid-nodetwist fM Ballisitic damage manifests as damage vector w, w’, and f DOFs connected to damaged element end-nodetwist fA measurement location
50 Hz 10 Hz Damage Vector for Ballistic Damage displacement w Damage is 5% decrease in mass of element 7 bendingslope w' mid-nodetwist fM Why is damage vectorcontaminated? end-nodetwist fA Centrifugal Stiffening measurement location
50 Hz 10 Hz Damage Vector for Compound Damage displacement w Damage is • Root bending stiffness • Pitch link stiffness • Ballistic damage Results show • Each damage type is identified • Combined damage vector is equal to sum of individual damage vectors bendingslope w' mid-nodetwist fM end-nodetwist fA measurement location
Damage Detection, Location & Characterization Summary • Residual force vector (a.k.a. damage vector) requires • refined model of healthy system • measured response of damaged system • model or measurement of external force • All fault types studied were detected and located viaresidual force vector • Similar faults are distinguishable • Compound fault damage vector = sum of individual damage vectors • No clear frequency recommendation • Requires a single interrogation frequency
Why are rotor system damage extentcalculations difficult? • Aerodynamic Loads • Non-symmetric aerodynamic matrices • Damping • Centrifugal Stiffening • large CF stiffening • mass / stiffness coupling • Coriolis Forces • Skew symmetricmatrices
Damage Extent for Gyroscopic Systems • Yap and Zimmerman (1999) solved the gyroscopic problem via the “Asymmetric Minimum Rank Perturbation Theory” • Modal based model update • Find the perturbation matrix of minimum rank subject to constraint of null symmetry • This modal analysis based approach was extended to a FRF based approach as part of the current work
Damage Extent (step 2)FRF -"Asymmetric Minimum Rank Perturbation Theory” Stiffness damage: Damping damage: Mass damage: Where [ B ] =matrix collection of damage vectors (step 1) = [ d1, d2, …, dp ] [ jWint ] = diagonal matrix of interrogation frequencies [ X ] = matrix collection of damaged system response = [ {X(jw1)}, {X(jw2)}, …{X(jwp)} ] The number of independent columns of [ B ] and [ X ] is equal to the rank of the perturbation matrix (e.g. flap only: mass=4, stiffness=2) BUT! Must know nature (mass, damping, stiffness) a priori.
Calculation of Parameter Change Exact DK x 104 1 0 -1 -2 • AMRPT results in perturbation matrix of full dimension • Non-zero terms describe change in elemental matrix • For damage located in a single element, change in physical parameter is calculated using structure of elemental matrix • e.g. 5 10 15 20 25 30 35 40 DOF 5 10 15 20 25 30 35 40 DOF
Mass Damage in Rotating Structure • Observations: • Off diagonal terms in mass and CF stiffness matrices depend on c.g. offset - typically small • CF affects inboard elements in flapwise motion only • Neglecting off-diagonal terms, problem is now (3 x 3) in twist • Solve problem using twist DOFs only - still coupled in mass & stiffness • Solution: • Iterate on coupled twist problem
where x is damagedparameter (EI, GJ, rA) Damage Extent Summary AMRPT results show improvementusing higher interrogation frequencies AMRPT Damage Extent Quantification Error Errors stem from small errors in damage vector
Outline Background & Motivation Objectives of Work Modeling Approach Damage Identification Theory & Results Effect of Modeling Errors Noise & Noise Mitigation Alternate Extent Quantification Approach Measurability Conclusions
10% modeling error no error Effect of Modeling Errors Model Error: 10% stiffness error in baseline model Damage: 5% outboard bending stiffness Damage Detection Destroyed!!
no correction corrected d no error Correction of Modeling Errors Model Error: 10% stiffness error in baseline model Damage: 5% outboard bending stiffness Interrogation: +/- 2.5 deg., w = 40 Hz Use damage vector correction: d=dd-dh