Download
1 / 15
150 likes | 257 Views
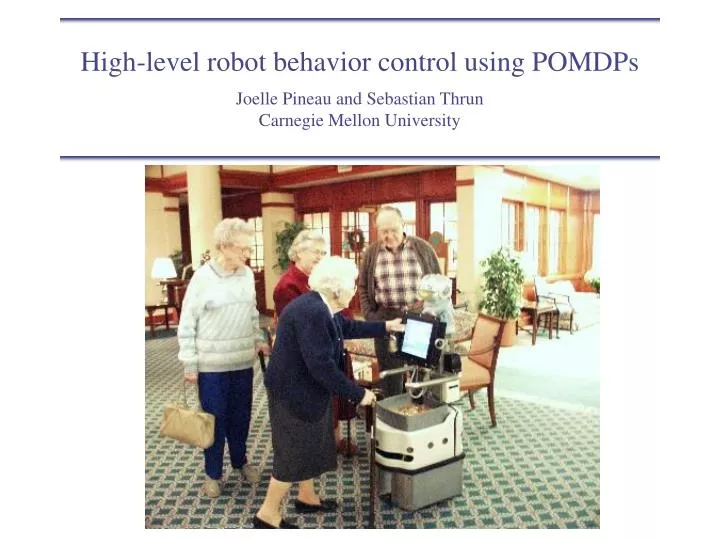
High-level robot behavior control using POMDPs Joelle Pineau and Sebastian Thrun Carnegie Mellon University. eyes with cameras. “thinkers”. LCD smile/frown. handlebars. carrying tray. sonar sensors. wheeled base. Introducing Pearl.

E N D
High-level robot behavior control using POMDPsJoelle Pineau and Sebastian ThrunCarnegie Mellon University
eyes with cameras “thinkers” LCD smile/frown handlebars carrying tray sonar sensors wheeled base Introducing Pearl • Pearl is a prototype nursing robot, providing assistance to both nurses and elderly people. CogRob2002 workshop
Profile of our aging population • 450,000 more nurses needed by 2008 • campaign to recruit and retain nurses and other health care providers CogRob2002 workshop
Our vision of robotic-assisted health-care Management support of ADLs Providing information (TV, weather) Reminding to eat, drink, & take meds Monitoring Rx adherence & safety Linking the caregiver to resources Calling for help in emergencies Providing physical assistance Supporting inter-personal communication Moving things around Enabling use of remote health services CogRob2002 workshop
The Nursebot project in its early days CogRob2002 workshop
Top controller Autominder (Pollack et al., 2002) People tracking/following (Montemerlo et al., 2002) Speech recognition&synthesis (Ravishankar, 1996; Black et al., 1999) Autonomous navigation (Burgard et al., 1999) We need a high-level controller that can: • prioritize goals from specialized modules • trade-off goals with widely different costs/rewards • trade-off between information-gathering and goal- satisfaction • switch between tasks and share sensory information • handle uncertainty CogRob2002 workshop
High-level robot behavior control usingPartially Observable Markov Decision Processes BELIEF STATE OBSERVATIONS STATE USER + WORLD + ROBOT ACTIONS CogRob2002 workshop
What are POMDPs? POMDP is n-tuple { S, A, , b, T, O, R } POMDP task 1: State tracking: After an action, what is the state of the world? POMDP task 2: Computing a policy: Which action should the controller apply next? rt-1 rt ... st-1 st ... World state: ot-1 ot at-1 ?? Control layer: ... bt-1 ?? ... Robot belief: Not so hard. Very hard! CogRob2002 workshop
Our approach: Hierarchical POMDPs • Key Idea:Exploit hierarchical structure in the problem domain to break a problem into many “related” POMDPs. subtask Act abstract action InvestigateHealth Move Navigate AskWhere CheckPulse CheckMeds North South East West primitive action CogRob2002 workshop
Planning with Hierarchical POMDPs • Given POMDP model M = { S, A, , b, T, O, R } and hierarchy H • For each subtask h H: 1) Set components Ah children nodes Sh S h bh, Th, Oh, Rh 2) Minimize model Sh {zh(s0), …, zh(sn)} h {yh(o0), …, yh(op)} 3) Solve subtask h h {bh, Th, Oh, Rh} AMove ={AskWhere,Navigate} SMove ={X’,Y’,Destination} Move ={o0,…,op} ANav ={N,S,E,W} SNav ={X,Y} Nav ={o0,…,om} Move Navigate AskWhere West South East North CogRob2002 workshop
Act InvestigateHealth Move Navigate AskWhere CheckMeds CheckPulse West North South East Execution with Hierarchical POMDPs • Step 1 - Update belief: • Step 2 - Traversing hierarchy top-down, for each subtask: 1) Get local belief. 2) Consult local policy. 3) If a is leaf node, terminate. Else, go to that subtask. CogRob2002 workshop
Experimental Setup • Task: Robot provides reminders and guidance to elderly user. • Action hierarchy: CogRob2002 workshop
Sample Scenario CogRob2002 workshop
Still unconvinced about the importance of uncertainty? CogRob2002 workshop
On the question of numerical vs logical representations... • We haven’t tried using logical representations to control the robot… • But our experience tells us that: • Uncertainty is crucial when dealing with people. • Probabilistic techniques are necessary to reason about uncertainty. • Real belief tracking and planning really matters! CogRob2002 workshop