Download
1 / 39
410 likes | 596 Views
Embedded Systems: Hardware Computer Processor Basics ISA (Instruction Set Architecture) RTL (Register Transfer Language) Main reference: Peckol, Chapter 1. Fig. 01-00. fig_01_01. Basic components. Common bus structure: address, data, control. fig_01_01. fig_01_03. fig_01_05.

E N D
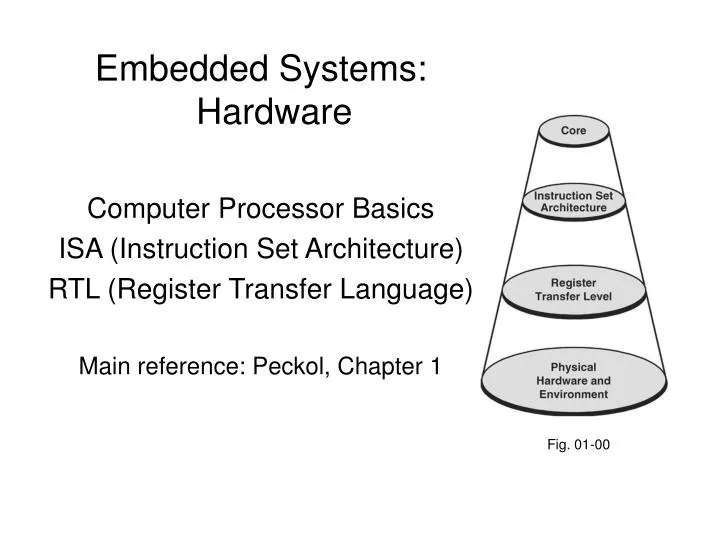
Embedded Systems: Hardware Computer Processor Basics ISA (Instruction Set Architecture) RTL (Register Transfer Language) Main reference: Peckol, Chapter 1 Fig. 01-00
fig_01_01 Basic components Common bus structure: address, data, control fig_01_01 fig_01_03
fig_01_05 Some processor options (note firmware) 1. Microprocessor-based system fig_01_05 2. Microcontroller-based system Fig. 1-05 components integrated into one unit) fig_01_07 DSP (A/D, D/A; high speed—video, audio, images fig_01_06
DATA: DATA TYPES fig_01_08 NUMERIC --Unsigned integer --Signed integer (2’s complement, sign-magnitude, fixed point, etc.) --Floating point: 3 components: sign exponent mantissa fig_01_08 NONNUMERIC --address --character
Numeric data • Range is always limited. Number of digits of resolution is size of fractional part. • Example: in 4 numeric bits: • Number of bits in fractionrange • 0 (integer) 0-15 • 1: xxx.x 0-7.5 • (fractions 0, ½) • 2: xx.xx 0-3.75 • (fractions, 0, ¼, ½, ¾) • 3: x.xxx 0-1.875 • (fractions, 0, 1/8, ¼, 3/8, ½, 5/8, ¾, 7/8) fig_01_09
Most base 10 fractions cannot be represented exactly in binary: Example: how to represent 2.x in 4 bits, with 2 bits of resolution? Choices: 2.0, 2.25, 2.5, 2.75, 3.0 2.1 2.0 or 2.25 2.2 2.0 or 2.25 2.3 2.0 or 2.25 or 2.5 fig_01_09 fig_01_09 r rounding truncation truncation Error range for n bits of resolution: Truncation: -2-n < Etruncation < 0 Rounding: - ½ 2-n < Erounding< ½ 2-n Computation: which is easier to compute? rounding down rounding up
Error propagation in arithmetic: Examples: Consider two numbers whose true values are N1 and N2 and whose values in the computing system are N1E and N2E Addition: errors add: N1E = N1 + E1 N2E = N2 + E2 N1E + N2E = (N1 + E1) + (N2 + E2) = N1 + N2 + E1 + E2 Multiplication: error: N1E * N2E = (N1 + E1) * (N1 + E2) = (N1N2) + (N2 * E1 + N1 * E2) + (E1 * E2) term 1 term 2 Note that if term 2 is neglected then error depends on size of N1 and N2 fig_01_09
Another example (pp. 11-12 of text): measuring power dissipated in resistor R in the following circuit: Suppose E = 100 VDC +/- 1%, I = 10A +/- 1%, R = 10 ohms +/- 1%. 3 methods of caluculatin power dissipated, neglecting lower order error terms: a. E1 = (100V +/- 1%) * (10A +/- 1%) = 998.9 1001.1 b. I2R = (10A +/- 1%) * (10A +/- 1%) * (10 ohms +/- 1%) = 997 1003 c. E3 = (100 V +/- 1%)*(100 V +/- 1%) / (10 ohms +/- 1%) = 908.9 1111.3 Which should we use? “optimistic”: a “middle-of-the-road”: average of a,b,c “safest”: c fig_01_10 fig_01_10
Instructions—ISA level • Instruction coding: • HLL (high level language, C, C++ , e.g.) • assembly language (ISA) • machine language (can work at any level; high level allows faster but less efficient coding) IEEE Standard 694-1985—IEEE standard for microprocessor assembly language—used for examples in text
operator addr mode operand(s) Instruction coding: Fields: operator, operands (type of addressing) Example: 32 bits 3 bits: opcode 2 bits: address mode (e.g. direct, indirect, indexed, immediate) 27 bits: for addressing operand (s) Expanding opcode (example): 000-110xxxx…xxx: 2 operands 1110xxx…xxx: 1 operand 1111xxx…xxx: no operand (e.g., HALT)
Example instruction formats fig_01_13 fig_01_14 fig_01_13 fig_01_15
Instructions Instruction types: arithmetic / logical data movement control Arithmetic / logical instructions: operator; number of operands; arity (unary, binary, three-operand, …) Examples: x = -x negation, assignment x = y assignment x = x + y addition, assignment z = x + y addition, assignment
fig_01_42 Typical ALU and registers fig_01_42
Common ALU functions fig_01_43 fig_01_43 Cannot be affected by interrupt
Common ALU functions (continued) fig_01_44 fig_01_44
fig_01_45 Common ALU functions (continued) Question: what is a minimal set of ALU instructions? fig_01_45
fig_01_16 Data movement instructions: source / destination fig_01_16
fig_01_17 Common data movement instructions fig_01_17 Question: how can you implement XCH without using a temporary variable?
Addressing modes: Immediate: MOVE A, #BH; Direct: MOVE OPR1, OPR2; Indirect: MOVE OPR1, *myVarPtr; MOVE *OPR1, *OPR1; MOVE *OPR1, **yPtr; Register direct: MOVE Reg1, Reg2; Register indirect: MOVE Reg1, *Reg2; Indexed (loops): MOVE Reg1, OPR2[REG2]; PC relative (loops,e.g.; offset can be negative): ADD PC, [Reg1]; Example: what is the difference between Y, *Y, **Y fig_01_12 fig_01_12 Indirect addressing—myVarPtr holds address or myVar
Addressing examples: fig_01_21 fig_01_21
fig_01_22 fig_01_22
fig_01_23 fig_01_23
fig_01_24 fig_01_24
fig_01_25 Control instructions Control can be: sequential (default) loop (pre or posttest) branch: go to conditional (if, if-else,, case, branch on condition) procedure or function calll
Branch instructions Typical condition codes Typical branch instructions: fig_01_29 fig_01_29 fig_01_30
Example of conditional statements: C / assembly language: fig_01_31 fig_01_31 fig_01_32
Looping: example fig_01_34 fig_01_34 fig_01_35
Function or procedure call: Must store return address, pass information back and forth What are standard parameter passing methods? fig_01_36 fig_01_36 fig_01_37
fig_01_39 Stack: common way to handle procedure / function calls Q: what are two alternative methods for handling function / procedure calls? Which methods facilitate recursion? fig_01_39
fig_01_40 Function call: example: fig_01_40 fig_01_41
Question: can you design a “general-purpose computer” with a 3-bit opcode?
fig_01_46 Different viewpoint: RTL: register-transfer language level fig_01_46
fig_01_49 Register behavior: Read / Write; Serial / Parallel fig_01_49 fig_01_51 fig_01_50
fig_01_52 RTL VIEW fig_01_52 fig_01_53
fig_01_54 Instruction execution cycle Q: Where is this step implemented? fig_01_55 fig_01_54
fig_01_57 Multiple levels--examples fig_01_57
fig_01_58 fig_01_58
fig_01_59 fig_01_59
table_01_03 table_01_03