Download
1 / 34
340 likes | 464 Views
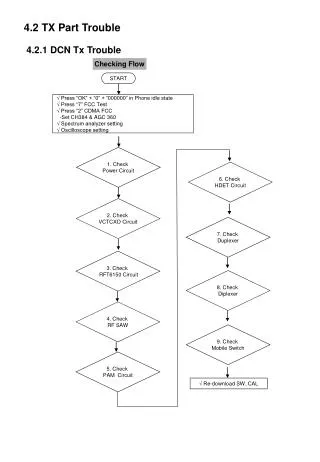
Rule Checking. SLAM Checking Temporal Properties of Software with Boolean Programs Thomas Ball, Sriram K. Rajamani Microsoft Research Presented by Okan Duzyol. Introduction. Software Validation: Traditionally done by testing, lately by property checking tools.

E N D
Rule Checking SLAM Checking Temporal Properties of Software with Boolean Programs Thomas Ball, Sriram K. Rajamani Microsoft Research Presented by Okan Duzyol
Introduction • Software Validation: Traditionally done by testing, lately by property checking tools. • Tools do not typically ensure that the software implements intended functionality correctly.
Background • The fundamental difficulty in using any kind of static analysis to detect program errors is that the problem is undecidable and equivalent to Turing’s halting problem. • Earliest static analysis tool that has been widely used is the Unix utility Lint.
Background • Specification language: Early tools check for common errors that can be characterized at the level of the programming language. Modern tools allow users to state the kind of errors they are looking for.
Background • Engineering tradeoffs: precision, scalability, soundness, completeness and usability. • No tool can be both sound and complete. • Attaching preconditions and postconditions to method boundaries has been widely advocated.
Checking Temporal Properties of Software with Boolean Programs • Takes a program written in imperative language and targets for a boolean program. • Checks whether a program obeys a Temporal Property, by checking invariants.
Is [L1,L3,L4,L5,ERR] feasible in B2? Decl {u=M} :=1; L1….. L2….. assert ( ! ( {u=M} & {*M=0})); assert ( ! ( 1 & {*M=0})); L3….. L4….. L5….. assert ( ! ( {u=M} & !{*M=0})); assert ( ! ( 1 & !0); ERR is not reachable
Goal: Validate temporal safety properties using model checking Microsoft Research
Motivation • Large-scale software – many components, many programmers • Integration testing • Impossible • Ineffective at best • Fuzzy requirements -> inconsistent implementation • Consistent requirements -> inconsistent implementation
SLAM Approach • Modules interact properly… • If program observes temporal safety properties of interfaces it uses • temporal safety= properties whose violation is witnessed by a finite execution trace, i.e. path to ERROR state • State temporal safety properties formally • Automatic verification • Interface compliance checked statically (catch bugs early)
SLAM Process Generate abstract boolean program from C code Model checker boolean program C2BP prog. P prog. P’ slic BEBOP SLIC rule predicates path NEWTON Predicate discoverer Language for specifying safety properties
SLAM = A collection of tools SLIC • Language for specifying safety properties C2BP • Generate abstract boolean program from C code BEBOP • Model checking boolean programs NEWTON • Theorem prover • Refine boolean program
SLAM - formally • P’ a C program, Ei={e1,e2,…,en} a set of predicates, apply C2BP to create a boolean program BP(P’,Ei) • Apply BEBOP to check whether exists a path piin BP(P’,Ei) that reaches ERROR state • if pinot found, terminate with SUCCESS • if pifound go to 3 • Use NEWTONto check pifeasible • Ifpifeasible, terminate with FAILURE • Ifpinot feasible find set Fi of predicates that explains infeasibility • Ei+1= Ei UFi+1 , i=i+1, go to 1
Example – device driver do { KeAcquireSpinLock(); nPacketsOld = nPackets; if(request){ request = request->Next; KeReleaseSpinLock(); nPackets++; } } while (nPackets != nPacketsOld); KeReleaseSpinLock(); Prove safety – “something bad does not happen” (lock acquired/released twice)
Step 0 – Property Specification typedef {Locked, Unlocked} STATETYPE; typedef {Acq, Rel} MTYPE; STATETYPE state = Unlocked; FSM(m : MTYPE){ if ((state==Unlocked) && (m==Acq)) A: state = Locked; else if ((state==Locked) && (m==Rel)) B: state = Unlocked; else ERROR: ; } • SLIC Specification = FSM • Global state • State transitions (events)
Step 1 - Instrumentation do { KeAcquireSpinLock(); C: FSM(Acq); nPacketsOld = nPackets; if(request){ request = request->Next; KeReleaseSpinLock(); D: FSM(Rel); nPackets++; } E: } while (nPackets != nPacketsOld); KeReleaseSpinLock(); F: FSM(Rel); typedef {Locked, Unlocked} STATETYPE; typedef {Acq, Rel} MTYPE; STATETYPE state = Unlocked; FSM(m : MTYPE){ if ((state==Unlocked) && (m==Acq)) A: state = Locked; else if ((state==Locked) && (m==Rel)) B: state = Unlocked; else ERROR: ; } SLIC Specification Instrumented Program P’
Outline • Step 0 - Specification • Step 1 - Instrumentation • Step 2 - Abstraction • Step 3 - Model Checking • Step 4 - Theorem Proving • Step 5 – Predicate discovery manual automated
Abstraction • Abstract Interpretation • In • C program P • set of predicates E={e1,e2,…,en} • Out • abstract boolean program BP(P,E) withnboolean variables V={b1,b2,…,bn} • Boolean program (C-like) • all vars have type bool • control nondeterminism (*) • only call by value
Step 2 – Abstraction (C2BP) typedef {Locked, Unlocked} STATETYPE; typedef {Acq, Rel} MTYPE; STATETYPE state = Unlocked; FSM(m : MTYPE){ if ((state==Unlocked) && (m==Acq)) A: state = Locked; else if ((state==Locked) && (m==Rel)) B: state = Unlocked; else ERROR: ; } decl {state==Locked, state==Unlocked}; void FSM({m==Acq,m==Rel}){ if ({state==Unlocked} & {m==Acq}) A: {state==Locked, state==Unlocked }:=1,0; else if ({state==Locked} & {m==Rel}) B: {state==Locked, state==Unlocked }:=0,1; else ERROR: ; }
Step 2 – Abstraction (C2BP) do { skip; C:FSM(1,0); skip; if(*){ skip; skip; D:FSM(0,1); skip; } E: } while (*); skip; F: FSM(0,1); do { KeAcquireSpinLock(); C:FSM(Acq); nPacketsOld = nPackets; if(request){ request = request->Next; KeReleaseSpinLock(); D: FSM(Rel); nPackets++; } E: } while (nPackets != nPacketsOld); KeReleaseSpinLock(); F: FSM(Rel); Instrumented Program P’ Boolean Program BP(P’,E0)
Step 3 - Model Checking (BEBOP) do { skip; C:FSM(1,0); skip; if(*){ skip; skip; D:FSM(0,1); skip; } E: } while (*); skip; F: FSM(0,1); decl {state==Locked, state==Unlocked}; void FSM({m==Acq,m==Rel}){ if ({state==Unlocked} & {m==Acq}) A: {state==Locked, state==Unlocked }:=1,0; else if ({state==Locked} & {m==Rel}) B: {state==Locked, state==Unlocked }:=0,1; else ERROR: ; } 1 3 4 2 Boolean Program BP(P’,E0) Is there a path that leads to ERROR ? YES [C,A,E,C,ERROR ]
Step 4 – Theorem Proving (NEWTON) do { KeAcquireSpinLock(); C:FSM(Acq); nPacketsOld = nPackets; if(request){ request = request->Next; KeReleaseSpinLock(); D: FSM(Rel); nPackets++; } E: } while (nPackets != nPacketsOld); KeReleaseSpinLock(); F: FSM(Rel); typedef {Locked, Unlocked} STATETYPE; typedef {Acq, Rel} MTYPE; STATETYPE state = Unlocked; FSM(m : MTYPE){ if ((state==Unlocked) && (m==Acq)) A: state = Locked; else if ((state==Locked) && (m==Rel)) B: state = Unlocked; else ERROR: ; } // nPacketsOld==nPackets, nPacketsOld != nPackets Is path [C,A,E,C] feasible ? NO
Step 5 – Predicate Discovery (NEWTON) do { skip; C:FSM(1,0); skip; if(*){ skip; skip; D:FSM(0,1); skip; } E: } while (*); skip; F: FSM(0,1); b: {nPackets == nPacketsOld}; do { skip; b:=1; C:FSM(1,0); skip; if(*){ skip; skip; D:FSM(0,1); skip; b:=0; } E: } while (!b); skip; F: FSM(0,1); Boolean Program BP(P’,E0) Boolean Program BP(P’,E1)
Step 3 - Model Checking (BEBOP) do { skip; b:=1; C:FSM(1,0); skip; if(*){ skip; skip; D:FSM(0,1); skip; b:=0; } E: } while (!b); skip; F: FSM(0,1); decl {state==Locked, state==Unlocked}; decl b: {nPackets==nPacketsOld}; void FSM({m==Acq,m==Rel}){ if ({state==Unlocked} & {m==Acq}) A: {state==Locked, state==Unlocked }:=1,0; else if ({state==Locked} & {m==Rel}) B: {state==Locked, state==Unlocked }:=0,1; else ERROR: ; } Is there a path that leads to ERROR ? NO
C2BP • From a C program P and a set of predicates E={e1,e2,…,en} create an abstract boolean program BP(P,E) which has n boolean variables V={b1,b2,…,bn} • Determine for each statement s in P and predicate eiin E how the execution of s can affect the truth value of ei • if it doesn’t, s->skip
C2BPcont’d • Static analysis • alias • logical model: p, p+i same object • interprocedural • side-effects (conservative)
BEBOP • Essentially a model checker • Interprocedural dataflow analysis -> reachable states • Uses BDDs to represent state/transfer functions • ERROR state reachability reduces to vertex reachability on the CFG of the boolean program BP which is decidable
NEWTON Predicate discoverer / Theorem prover • walk error path p found by BEBOP • compute conditions (predicate values) along p • if algorithm terminates • inconsistence detected ( =!), add to list of predicates, repeat whole process • else report p as witness
Results NT device drivers • Max 60000 LOC • <10 user-supplied predicates, tens-hundreds inferred • < 20-30 iterations • 672 runs daily, 607 terminate within 20 minutes
Conclusions • SLAM = process for checking temporal safety properties • Formally state safety properties that interface clients must observe • Fully automated validation (iterative refinement) • Sound; if process terminates either SUCCESS or FAILURE (w/counterexample) reported • Accurate (few false positives) - Poor scalability
References: • Automatic Property Checking for Software: Past, Present and Future; Sriram K. Rajamani, • Checking Temporal Properties of Software with Boolean Programs; Thomas Ball, Sriram Rajamani • Automatically Validating Temporal Safety Properties of Interfaces; Thomas Ball, Sriram Rajamani
Thank You Questions ?